
















EC機器人撞機卡死處理方式
2025-01-23
1. 簡介
本篇文檔詳細描述了EC機器人因各種原因造成的機器人卡死現象的處理方法。

2. 操作流程
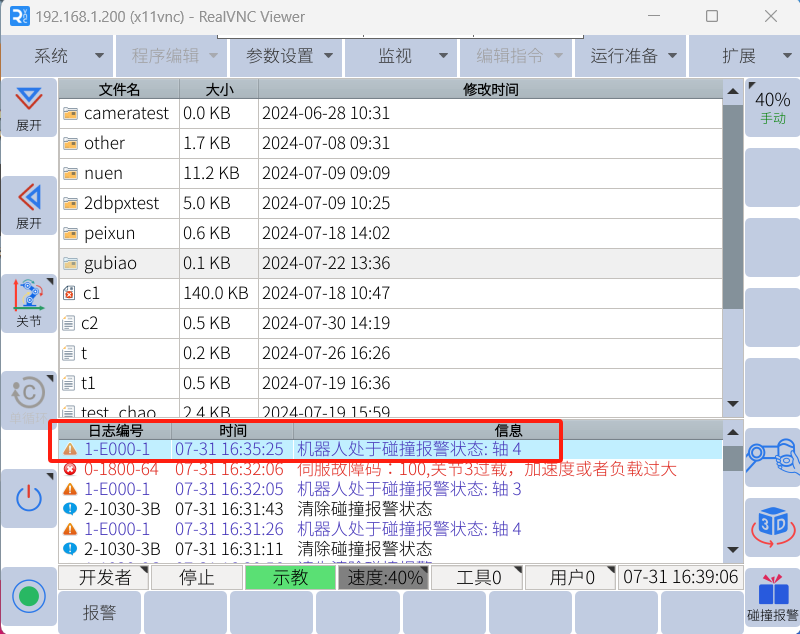
當機器人受到撞擊、或者其他外力因素導致機器人持續受到一定外部力導致持續觸發碰撞報警時。
更具撞擊程度和報警類型分為一下幾種處理方式:
1、藍色碰撞報警為系統設置靈敏度主動觸發,清除報警后反向移動可脫離卡死。
2、伺服故障100為機器人系統報警,如果無法清除報警可先降低或者關閉碰撞報警靈敏度后反向移動機器人脫離卡死。
3、當報警無法清除,或機器人無法上伺服時:
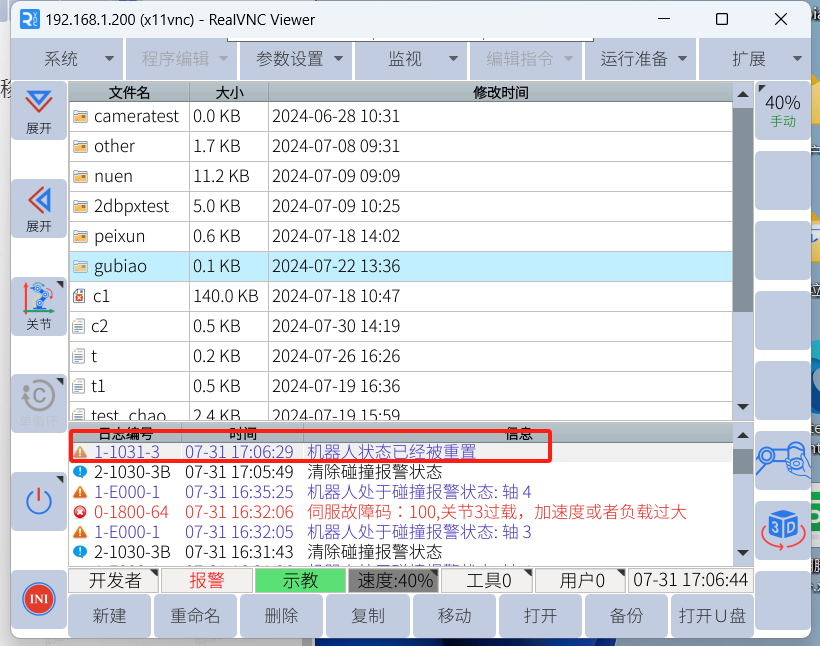
按以下操作先重置系統狀態:啟動按鍵→RST
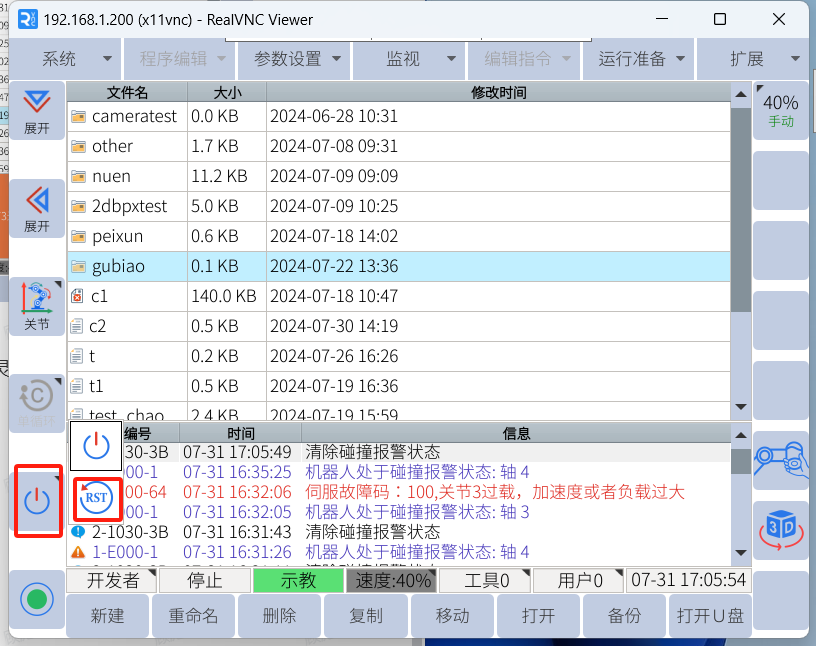
再按下圖進入反向驅動模式:啟動按鍵→BKD
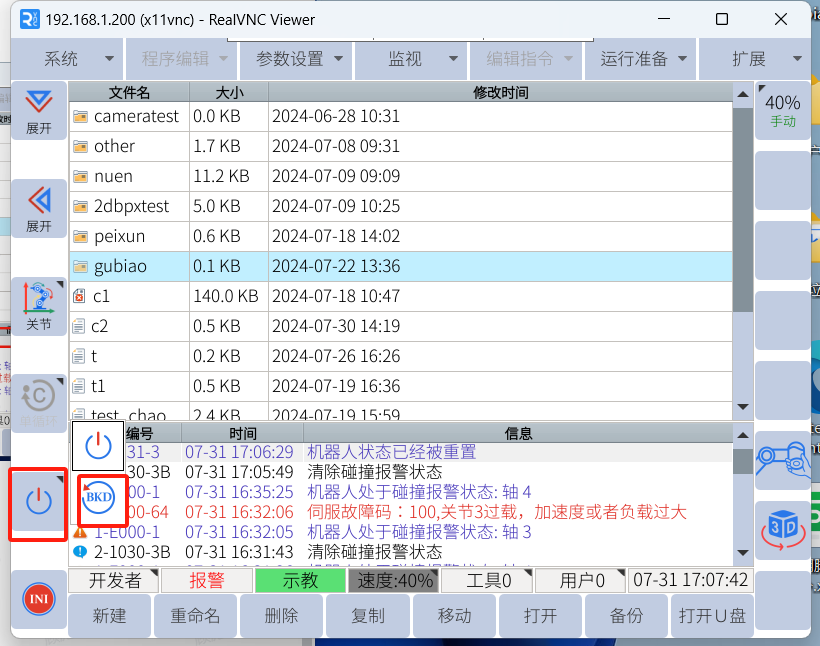
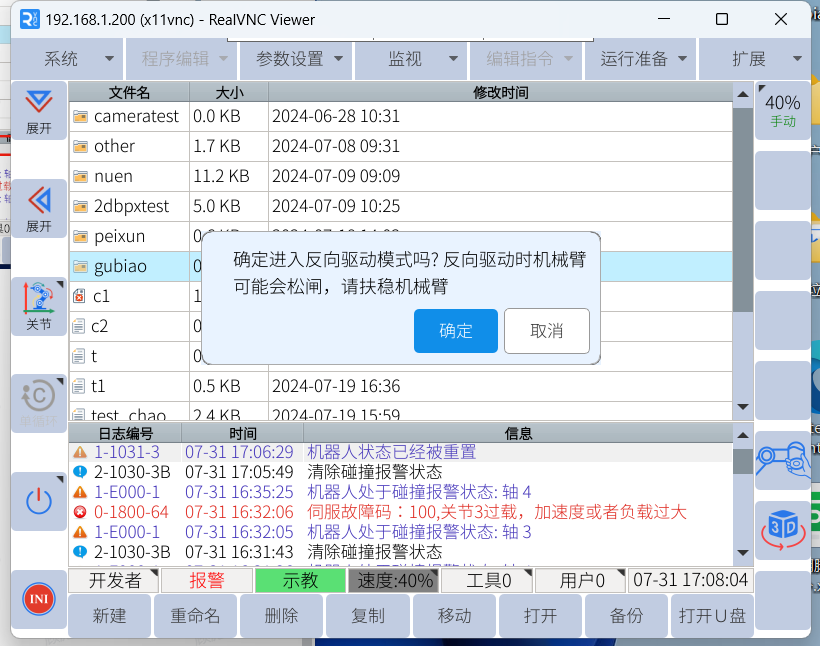
警告:進入反向驅動前請扶好機器人。
在進入以下界面后可以對卡死關節進行拖拽。

在反向驅動下拖拽的時候剛開始要用的力大一些;然后會聽到關節內有抱閘打開的聲音(聲音像是電磁鐵吸合的聲音)。示教器界面上會發現拖拽的關節會變綠。

在該狀態下如果不扶好機器人,松開抱閘關節會緩慢重力向下掉落。當機器人反向驅動脫離卡死后應該點擊退出。
警告:如果三關節卡死,反復用較大的力無法啟動反向驅動的時候;先嘗試用相同的力去拽動其他軸使機器人脫困;當拽動機器人某關節發現機器人整體結構發生很大形變的時候,應停止反向驅動。
如果無法進入反向驅動,或機器人無法上電,或者因為各種原因導致機器人無法脫離卡死的可以把機器人端蓋拆開;將電磁鐵往下壓,往下壓后可以轉動該軸。

注意:通訊報警下無法進入反向驅動模式。


























