
















EC機器人拖動參數設置
1. 簡介
在實際操作中,我們常常會用到拖動,可以達到快速移動機器人的目的。設置合適的拖動參數可以使拖動變得更加靈活
2.操作流程
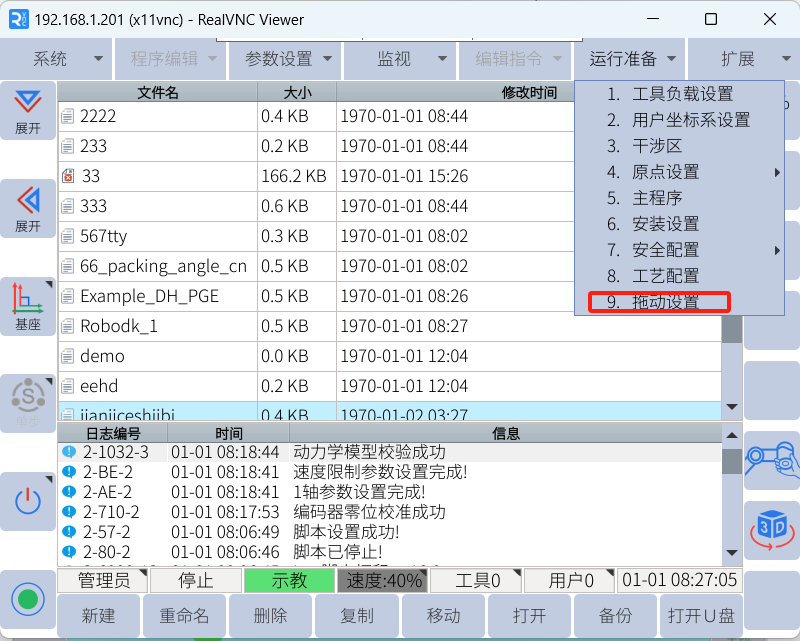
2.1打開拖動設置。
先升級為管理員權限模式,管理員權限密碼為333333,在運行準備中,點擊拖動設置。
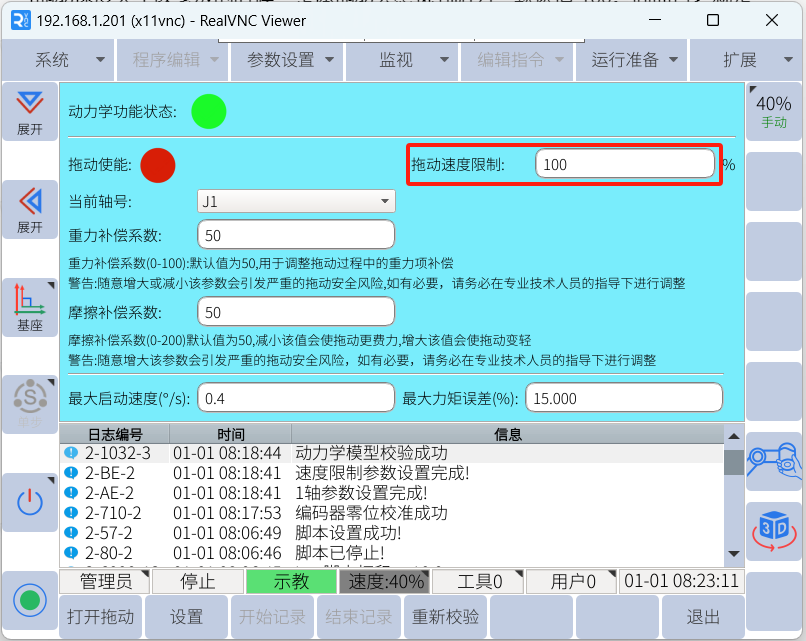
2.2拖動速度限制
定義:限制拖動速度的參數。
當拖動速度大于改參數的時候,整體拖動會感覺到阻力,默認值 100。簡而言之就是該值為拖動速度的限制,設置的越小,阻力越小就會越輕松。
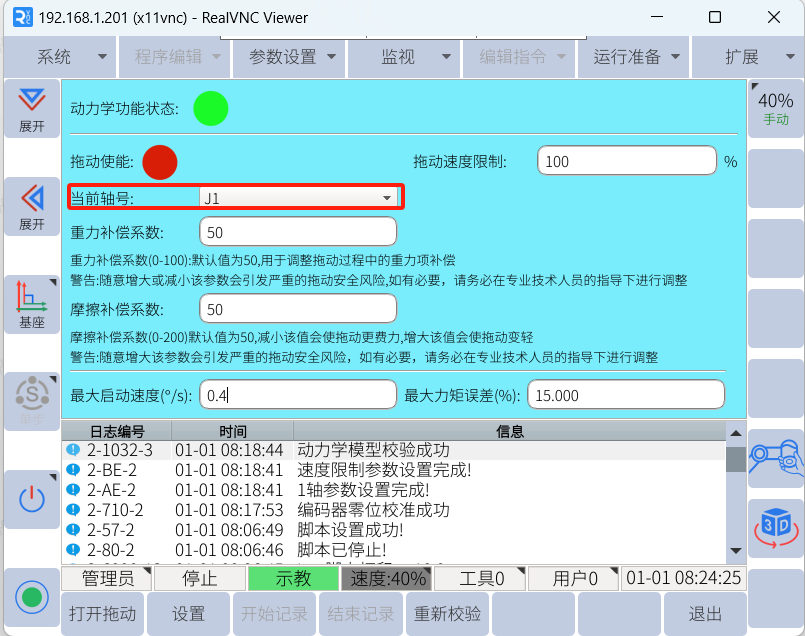
2.3當前軸號
設置參數的時候切記要記得設置軸號,選擇哪個軸,你設置的參數就會作用在該軸上,并不是設置一個參數,所以軸的參數都會改變。
注:很多人都會忘記看軸號,然后設置完參數再拖動,覺得參數設置是整體化的。也無需每個關節(jié)都設置一遍。使用時根據具體情況設置合適的參數。
2.4重力系數
定義:是機器人受到重力作用相對大小的參數。
當我們把負載的質量和重心設置到理論時,打開拖動使能開關,機器人某關節(jié)出現自動向下落的情況,可以將該參數調大,直至機器人穩(wěn)定不下落,默認50。
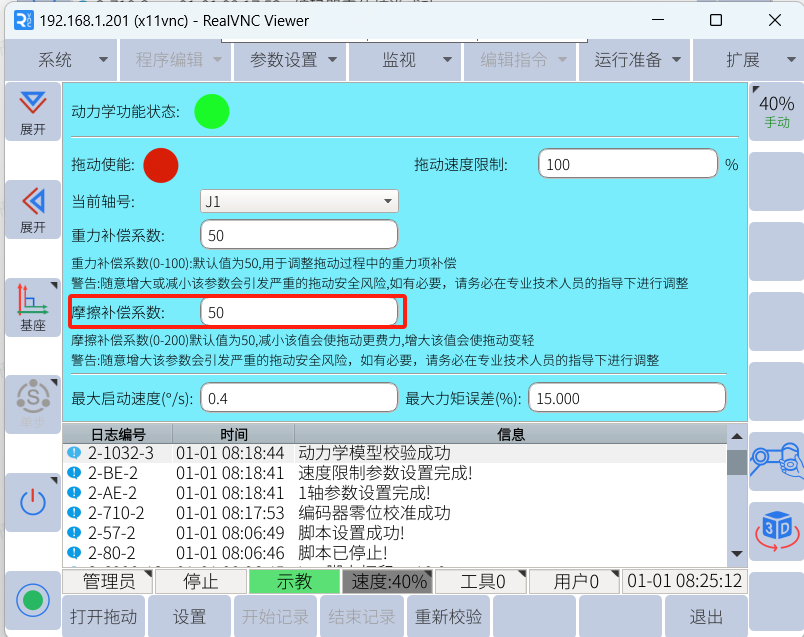
2.5摩擦補償系數
定義:該參數是改變拖動時軸與軸之間的摩擦力大小。
打開拖動,拖動某個關節(jié)時感覺摩擦力較大,拖動比較費力,可將該軸的摩擦補償系數調大,參數值越大,摩擦力越小,拖動越輕松。數值設置的越小,摩擦力越大,拖動越吃力。默認值為 50,建議可設置 60-90 之間,不建議設置到 100,默認50。
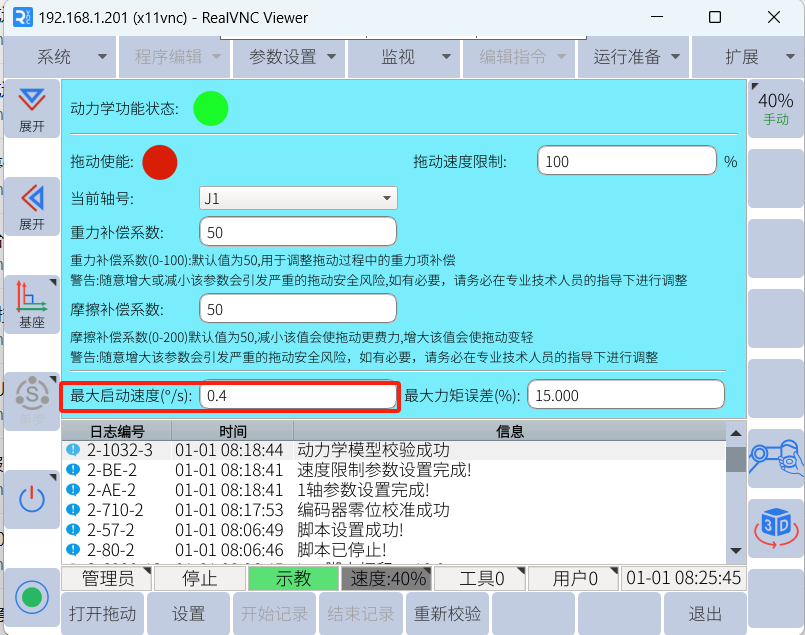
2.6 最大啟動速度
定義:打開拖動后一段時間 (100ms)內機器人的移動速度。
當該速度大于所設置的速度時,系統(tǒng)提示“拖動啟動速度異常”。建議設置 0.4--0.8,默認 0.4。
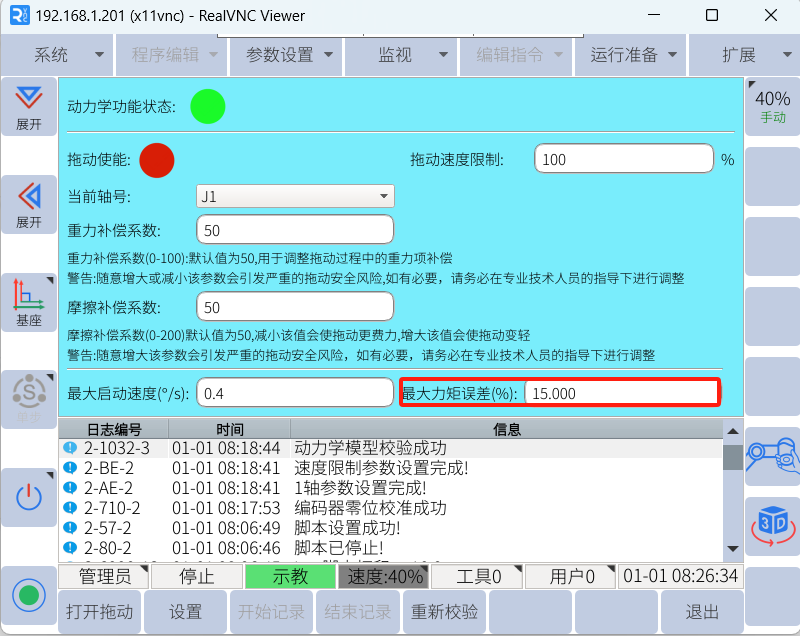
2.7最大力矩誤差
定義:是調整實際力矩超出標準力矩大小的部分占標準力矩的百分比。
誤差百分比不能設置過大,否則安全校驗會失效。有可能在【實際已經卸掉了負載,但負載參數還在】的情況下,拖動發(fā)生飛車情況。默認15
2.8常見故障答疑
打開拖動后與打開拖動前的力矩差值占打開前力矩的百分比當該百分比大于所設置的百分比時,拖動使能不會被打開且系統(tǒng)提示“力矩校驗失敗,無法打開拖動”。造成的原因: 安裝方式、負載、零位、連桿長度、額定轉矩、減速比、機器人類型錯誤,這需要工程師自行判斷。


























