
















CS機器人碼垛工藝包搭配視覺偏移使用方法
1.簡介
在機器人應用場景中有很多場景都是帶有視覺偏移,在碼垛和拆垛的場景中也少不了視覺引導定位,使用碼垛工藝包時搭配視覺引導定位的方法就與其他的視覺引導定位方法有所不同。一般視覺引導點位是直接在目標點上進行偏移即可,但是使用碼垛工藝包時不能直接在目標點上進行偏移,這就需要通過其他方法進行偏移。
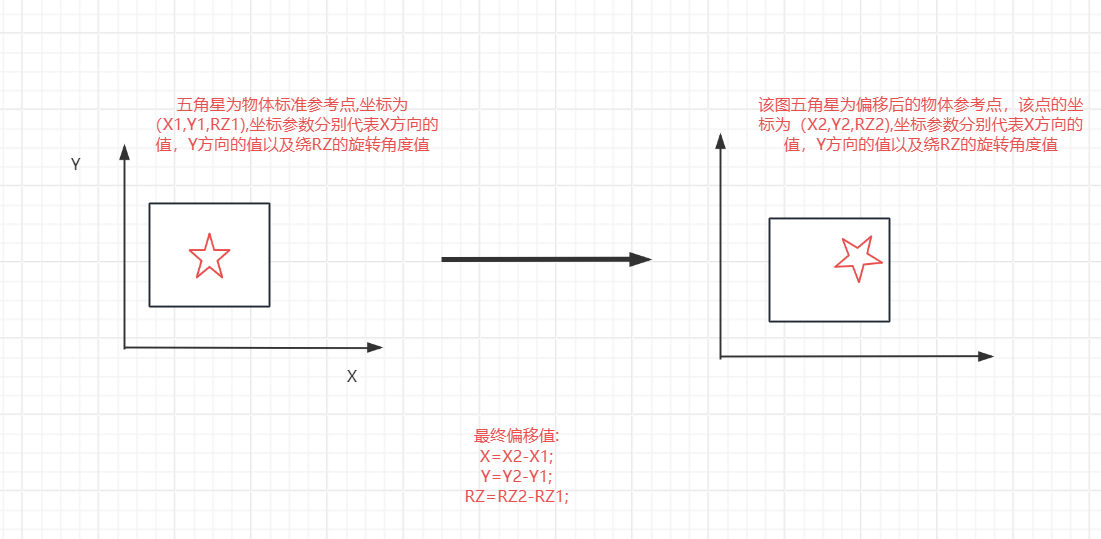
該圖為偏移講解圖
碼垛路點解釋:
- 'ApproachPoint'接近點:無碰撞接近參照點;
- 'ToolActionPoint'工具動作點:默認為參照點,可根據實際需要修改;
- 工具動作:“工具動作”節點下,添加相應的工具動作;
- 'ExitPoint'離開點:無碰撞離開參照點。
2.操作流程
2.1方法一-偏移用戶坐標系達到偏移效果
2.1.1建立用戶坐標系
第一步:在料盤上找到3個點,分別是原點,X正方向的點以及XY平面正方向的點。
第二步:進入機器人配置→坐標系→添加新的用戶坐標系(新坐標系命名需要是英文)→示教坐標系。(具體操作步驟請看圖-1紅色數字標記處)

圖-1
2.1.2使用用戶坐標系偏移
第一步:在機器人主任務里插入一個碼垛指令,坐標系選擇新建的用戶坐標系(如圖-2紅框標記處)。
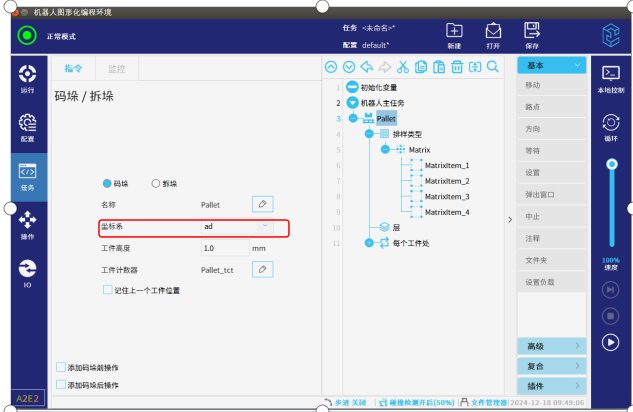
圖-2
第二步:使用pose_trans函數將坐標系ad按照得到的偏移值進行偏移(如圖-3紅框標記處),這樣碼垛工藝包里的碼垛點也會隨著坐標系ad的偏移而偏移。
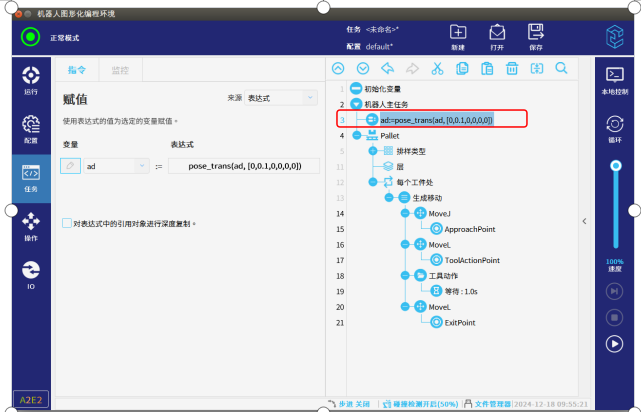
圖-3
2.2方法二-直接偏移目標點位
2.2.1將碼垛工藝包里3個運動點位都按照外部偏移值偏移(進入點,工具動作點,離開點)
第一步:在機器人主任務里插入一個碼垛指令,然后按照碼垛指令的使用方法將其各項參數設置好。
第二步:編寫一個偏移腳本,具體腳本內容如圖-4紅框標記所示。
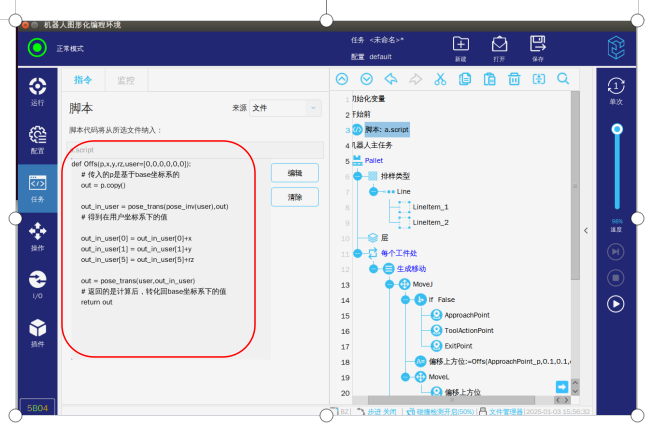
圖-4
第三步:在碼垛程序里按照圖-5紅框標記所示寫好偏移程序,要重新插入一個movel運 動指令,然后將偏移點位放在新插入的運動movel指令下(如圖-7紅框標記所示),如果直接將偏移點位放在碼垛指令自動生成的運動指令下就會出現機器人非正常運動。
注意:因為碼垛指令會臨時生成了個用戶坐標系,需要偏移的話要把這個點位轉換成基座標下加上補償值后再轉換成臨時生成用戶坐標系下的值去運動,所以在碼垛指令下的運動指令要選擇的是臨時生成的用戶坐標系(圖-5綠框標記處)。
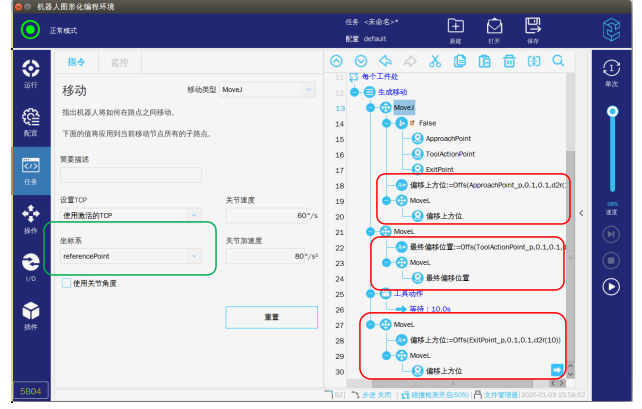
圖-5
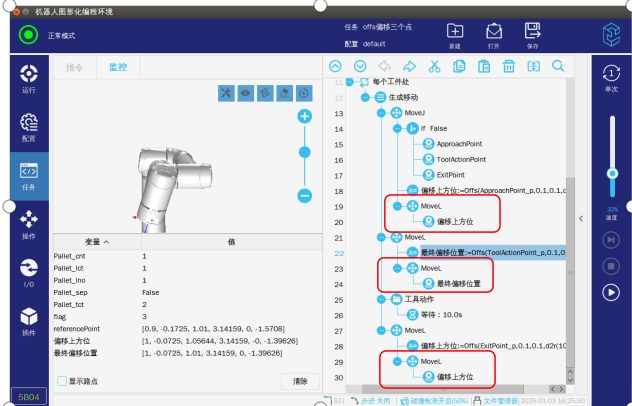
圖-6
2.2.2只按照外部偏移值偏移最終目標點
第一步:在機器人主任務里插入一個碼垛指令,然后按照碼垛指令的使用方法將其各項參數設置好。
第二步:編寫一個偏移腳本,具體腳本內容如圖-7紅框標記所示。
圖-7
第三步:在碼垛指令里編寫好最終偏移點和偏移上方點的偏移程序(如圖-8紅框標記所示),要重新插入一個movel運動指令,然后將偏移點位放在新插入的運動movel指令下(如圖-9紅框標記所示),如果直接將偏移點位放在碼垛指令自動生成的運動指令下就會出現機器人非正常運動。
注意:因為碼垛指令會臨時生成了個用戶坐標系,需要偏移的話要把這個點位轉換成基座標下加上補償值后再轉換成臨時生成用戶坐標系下的值去運動,所以在碼垛指令下的運動指令要選擇的是臨時生成的用戶坐標系(圖-8綠框標記處)。
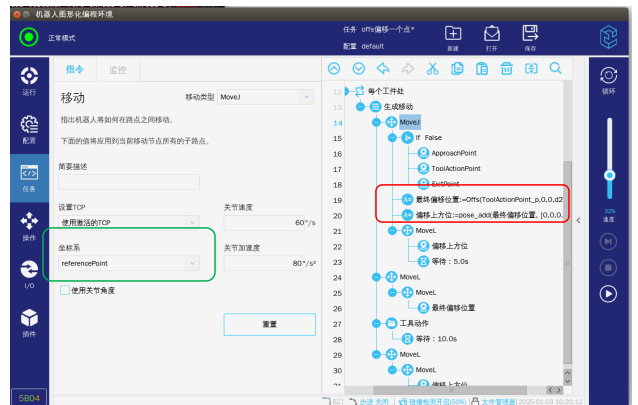
圖-8
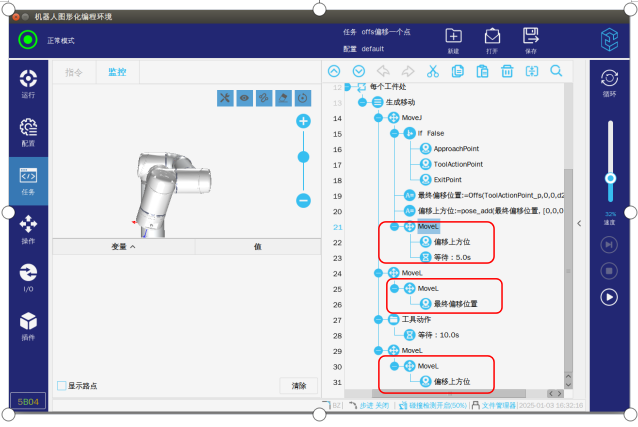
圖-9
3.常見問題解答
- 使用坐標系偏移方式偏移時,一定要注意把坐標系改成新建的用戶坐標系。
- 新建的用戶坐標系要使用英文命名。
- 使用2.2(方法2)進行偏移時要重新插入一個movel運動指令,然后將偏移點位放在新插入的運動movel指令下(如圖-6和圖-9紅框標記所示)。
- 使用2.2(方法2)進行偏移時因為碼垛指令會臨時生成了個用戶坐標系,需要偏移的話要把這個點位轉換成基座標下加上補償值后再轉換成臨時生成用戶坐標系下的值去運動,所以在碼垛指令下的運動指令要選擇的是臨時生成的用戶坐標系(圖-5和圖-8綠框標記處)。


























