CS機器人視覺引導上下(2D相機)
1. 簡介
隨著工業的發展,在生產中對自動化的要求越來越高,視覺技術已被廣泛引入機器人行業,具備視覺的機器人能更快、更準、更靈活地完成定位抓取、對位組裝等。基于圖像分析的視覺技術在機器人引導相關應用中的主要作用是精確獲取對象物(待抓取
物體)和目標物(待組裝物體)的坐標位置和角度,并將圖像坐標轉換為(工業機械臂)機器人能識別的機器人坐標,指導(機器人進行糾偏和組裝。因此,手眼標定和定位引導是機器視覺在機器人引導中應用的的核心
1.1 手眼標定原理
原理:所謂手眼標定,即將手(機械手)和眼(攝像機)的坐標系統一起來,解決相機與機械手之間的坐標轉換關系,讓機械手能精確抓取到攝像機定位的目標。
1.2 CS 機器人搭配視覺工作流程
CS 機器人搭配 2D 視覺,常用于偏移取料。常見流程:來料位置不固定,視覺在固定高位對產品拍照,算出產品位置后把數據發給機器人,機器人走到對應取料位夾取產品后再去放料。如 果沒有視覺,也可以用電腦網口調試助手和電腦虛擬機搭配測試,模擬視覺,用網口助手發對應偏移數據給到機器人運動。
1.3 運行前準備
1.3.1 檢查網絡是否連通
插好網線,將機器人 IP 和視覺 IP 設置成同網段(前三位相同,后一位不同),然后在視覺電腦終端 ping 機器人 IP,看是否能 ping 通,確認網絡有連通。
1.3.2 示教機器人的工具 TCP 和用戶坐標系
確認機器人的工具 TCP,可以用四點法把 TCP 點做到吸盤/夾爪中點,也可以不做,默認在法蘭中心,在做旋轉中心標定時用這個工具 TCP。
確認機器人的坐標系,可以利用基座坐標系,也可以先新建用戶坐標系,然后標定時使
用對應的用戶坐標系
注:1.機器人采用的單位是 m 和弧度制,相機發送過來的一般是 mm 和角度制,需要在機器人端或在相機端轉換。
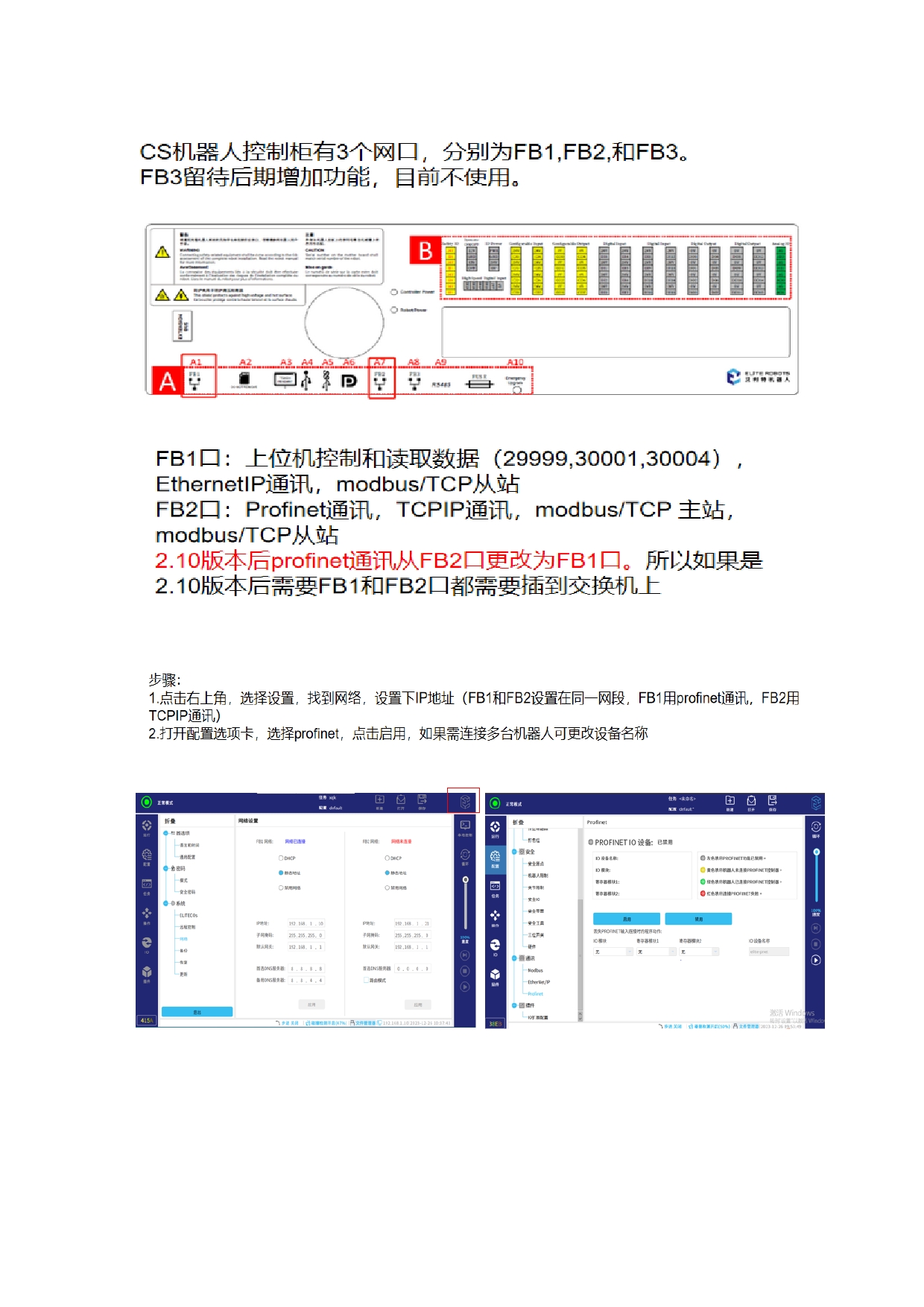
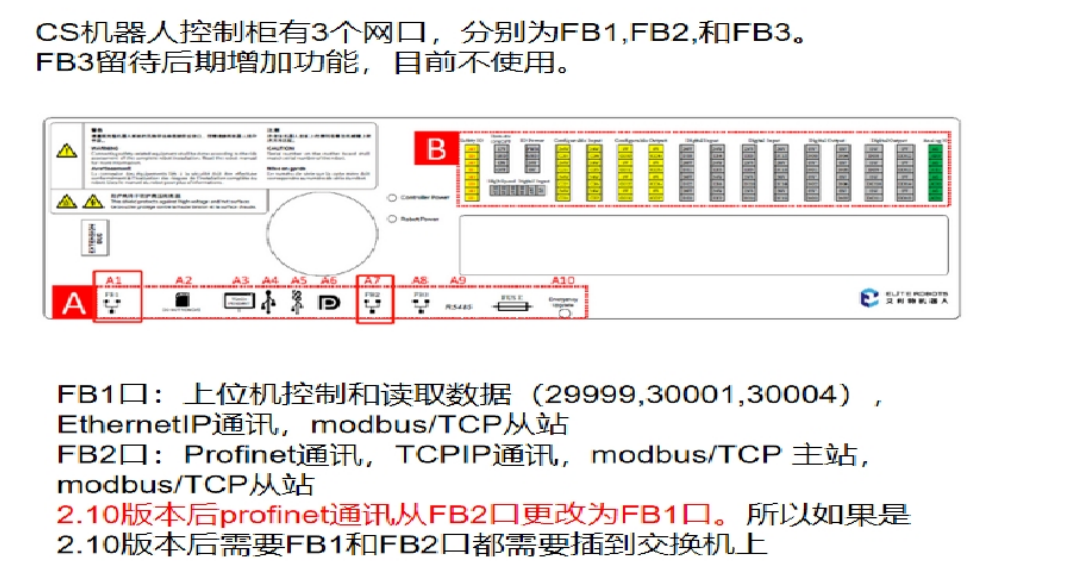
2.TCP/IP 通訊需要使用 FB2 口,需在網絡里配置 FB2 網口 IP 地址
1.3.3 9 點標定方向+3 點標定旋轉 TCP 點
本案例采用 9 點標定視覺方向與機器人基座標系 X/Y /Z 方向一致,每次移動 合適距離。
采用 3 點標定視覺旋轉中心與機器人工具 TCP 相同。如圖
2. 案例分享
2.1 案例簡介
機器人到固定位置取料,然后去拍照,獲取偏差值或者絕對值,以此來調整放料位置
PLC+2D 相機+CS 機器人
PLC 與機器人通訊協議:profinet,機器人做從站(CS-profinet 本文配置流程不再詳細介紹)
相機和機器人通訊協議:TCP/IP,機器人做客戶端
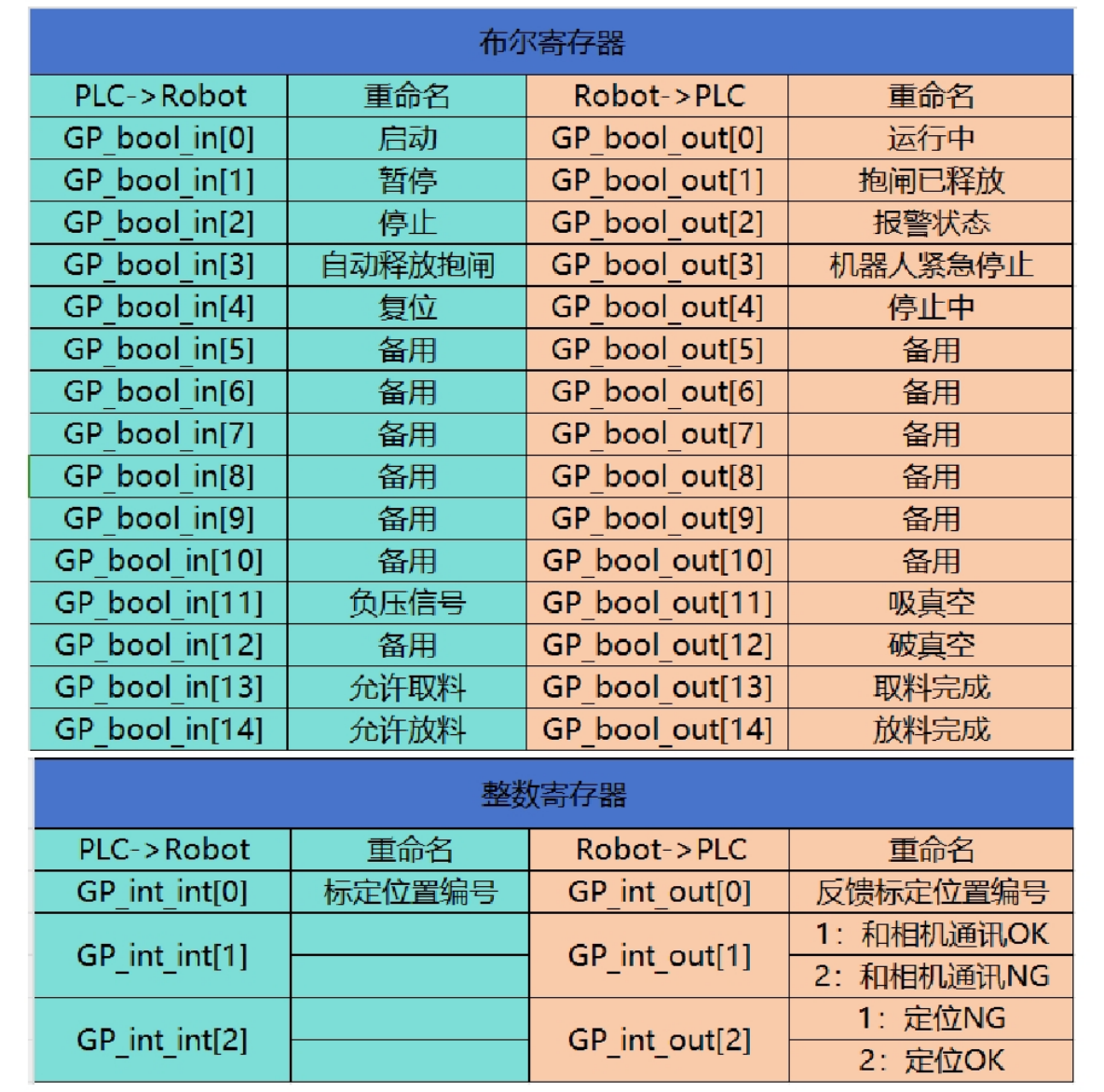
2.2 IO 定義
根據項目需求定義 IO 表
2.3 機器人配置
2.3.1 機器人基本配置
1.安裝方式(默認正裝)
2.負載設置(設置負載和重心,如設置不正確,會影響拖動效果和碰撞靈敏度)
3.根據需求看是否需要設置工具坐標 3.根據需求看是否需要設置用戶坐標
4. FB2 網口 IP 要和相機工控機 IP 設置同一網段
5. 安裝需要的插件:寄存器監視插件
(使用到的寄存器都需要重命名,方便在程序中使用,特別是整數寄存器和浮點寄存器,否則
程序中無法選擇該信號)
(注意:CS 機器人 PN 名稱,無法由 PLC 分配,只可機器人配置內更改)
2.3.3 安全原點輸出
可配置輸出主要配置安全原點信號,即機器人在 Home 位自動輸出一個信號
安全原點信號配置步驟:
1.設置原點
2.設置安全原點
3. 安全 IO 配置
3.1 首先【配置】【通用】里面找到【原點】 置一個機器人原點,根據現場實際情況進行設置,后期修改原點也可直接編輯位置。

3.2 設置安全原點
然后再進入【配置】【安全】【安全原點】 輸入之前設置好的安全密碼, 然后參考原點選擇剛剛設置的原點,點擊應用,安全原點就配置好了
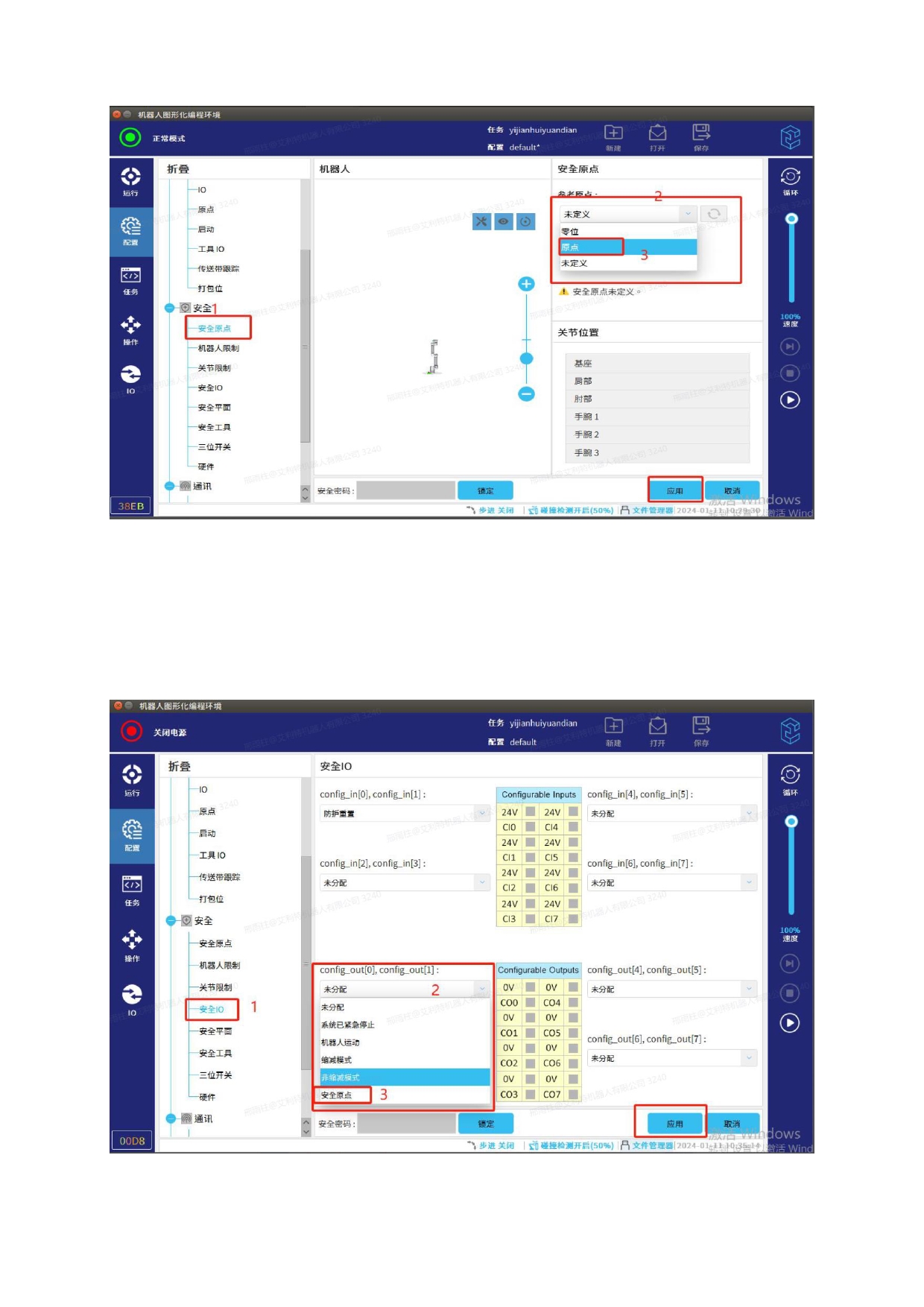
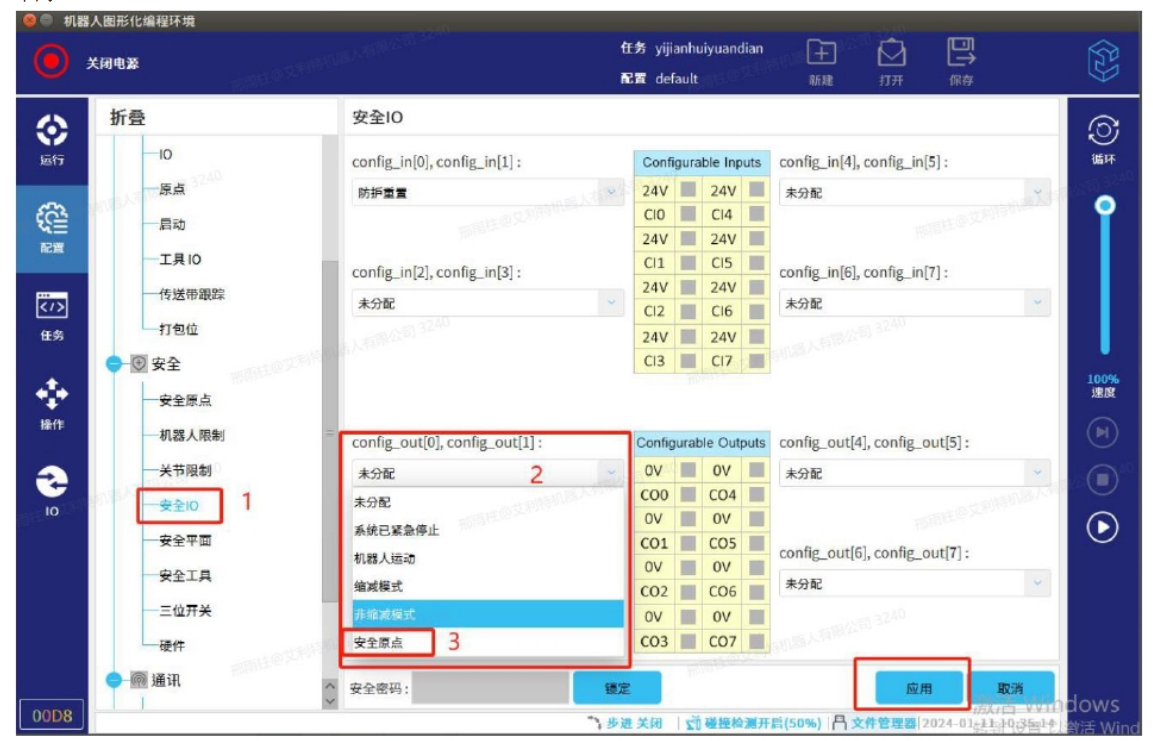
3.3 原點信號輸出
最后在【配置】【安全】【安全 IO】中選擇可配置輸出 IO,選擇其中一組信號,然后配置成需要的安全原點信號,這樣就可以機器人處于原點位置時,可以在可配置 IO 輸出的端口讀到輸出信號。
注意:設置完安全原點后,如果更新了原點位置,安全原點信號是沒法在新的原點位置輸出
的,需按上面步驟,把第二步重新進行更新一次原點,這樣就可以輸出新的原點信號給外部設
備了。
可以通過 profinet 通信協議讀取安全原點,也可以通過已配置好的可配置輸出信號。
2.3.4 主程序和釋放抱閘配置
在啟動選項卡配置開機自動加載任務文件,即主程序
自動釋放抱閘配置后,機器人收到這個上升沿信號后,會依次打開電源,釋放抱閘,若已經打
開電源,會直接釋放抱閘
注:啟動任務數字輸入可不配置,這個信號只有開機后第一次啟動任務有效,如中途暫停或停止后信號無效

2.3.4 啟動信號配置
(需要安裝寄存器插件,向艾利特工程師獲取或者點擊可下載 RegisterMonitor-1.2.6.0.elico)
配置-通用-IO,這里主要重命名信號,如果不重新命名,在 IO 配置中無法選擇此信號
輸入信號:
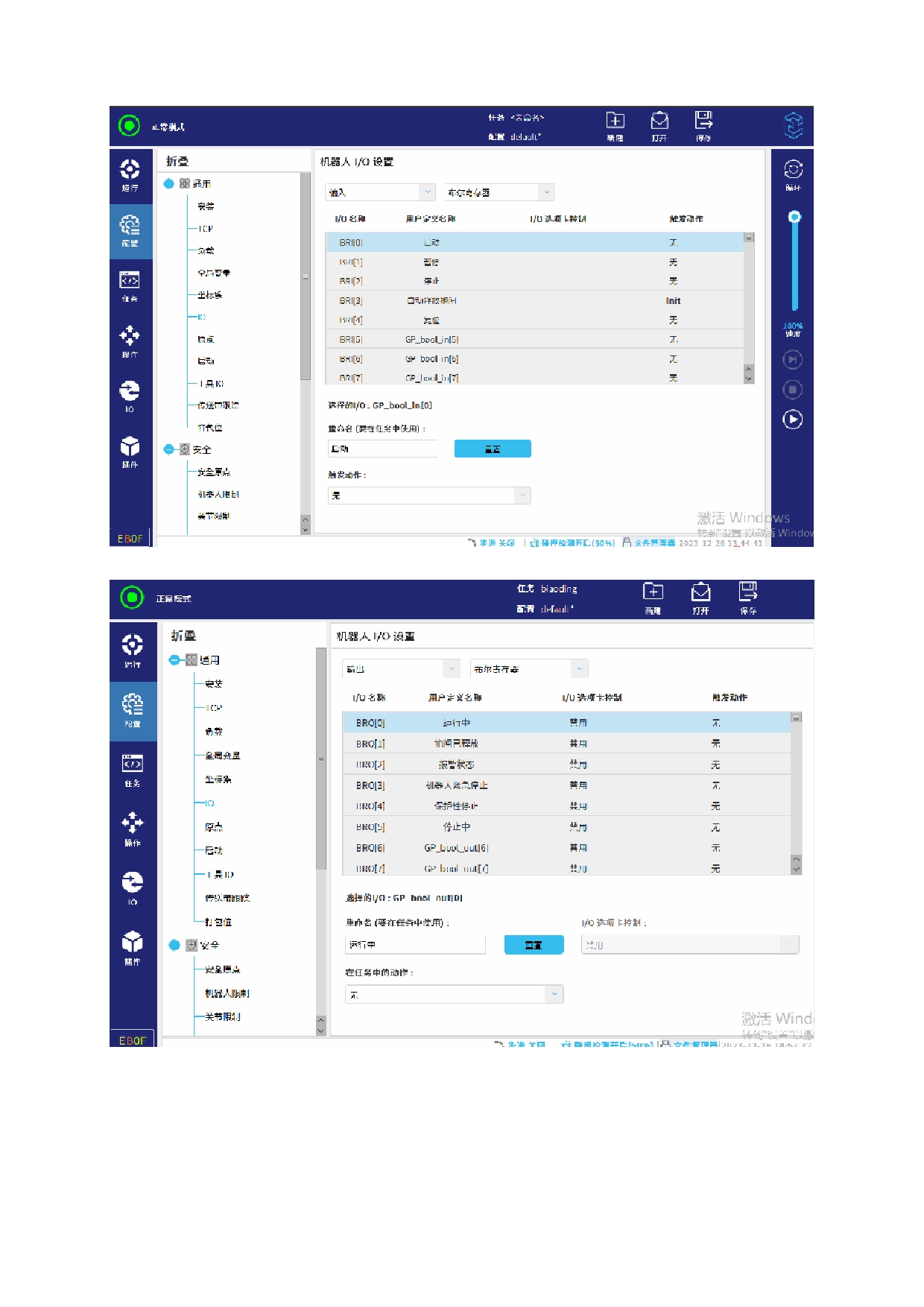
輸出信號:如上圖
2.4 機器人接線
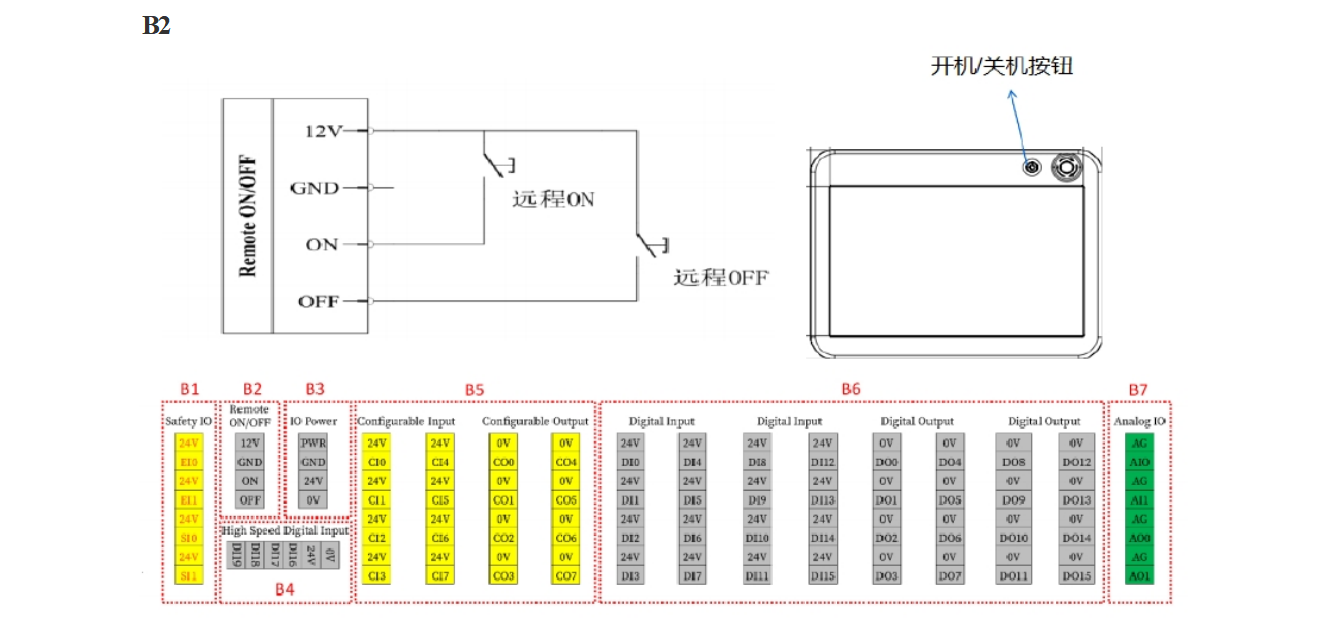
2.4.1 遠程開關機
機器人開機步驟:1.控制柜電源打開
2.點擊示教器上的開機按鈕(可以通過接線實現,如下圖)
B2
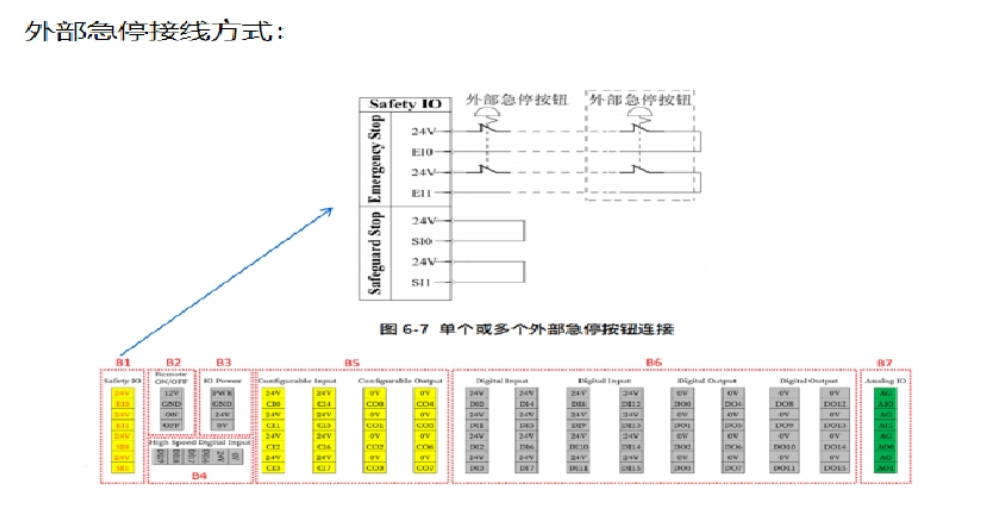
2.4.2 急停接線
2.4.3 網絡連接
2.4.4 遠程模式
外部控制機器人啟動需要將機器人模式改為遠程模式。

2.4.5 啟動時序
1.遠程開機或者示教器點擊開機按鈕
2.PLC 給機器人發送自動釋放抱閘信號,等待機器人反饋抱閘已釋放信號
3.在機器人無急停無報錯信號情況下,給機器人一個啟動信號,等待機器人運行中信號反饋,如
果超過 2 秒,未收到機器人運行中信號,關閉啟動信號 0.5 秒,再次啟動,循環直到收到啟動信號 止如需要程序重新開始,則給機器人停止信號,機器人反饋停止中,關閉停止信號,再給機器
人啟動信號,機器人反饋運行中,再關閉啟動信號
4. 如需暫停任務,可配置暫停信號。
3.相機標定
機器人要與相機進行 9 點標定或 3 點旋轉。若創建了坐標系,則給相機的點位要在創建的坐標
系下的點位
9 點標定是為了建立相機坐標系和機器人坐標系之間的變換關系
3 點旋轉是為了旋轉中心與機器人工具 TCP 一致
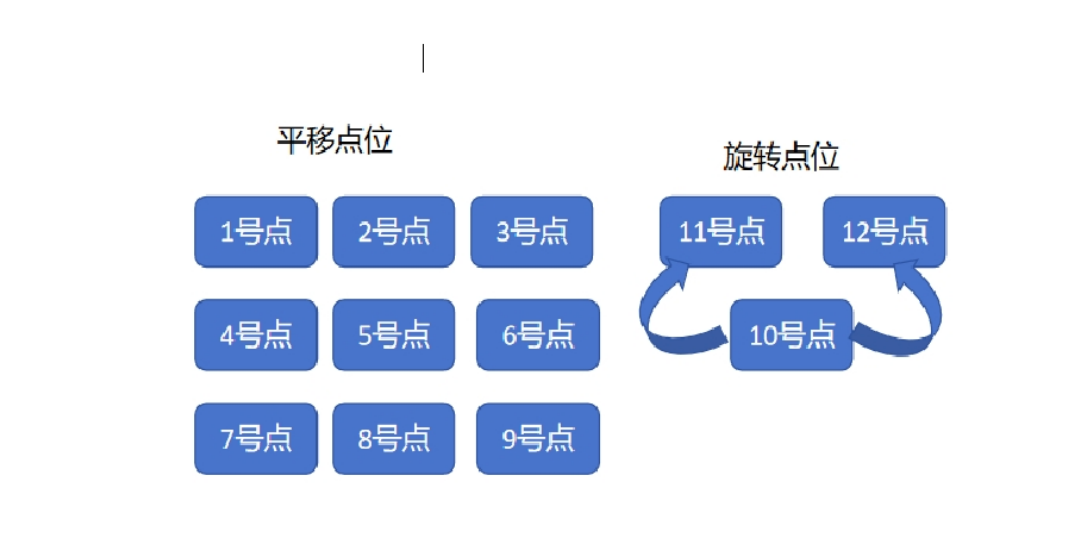
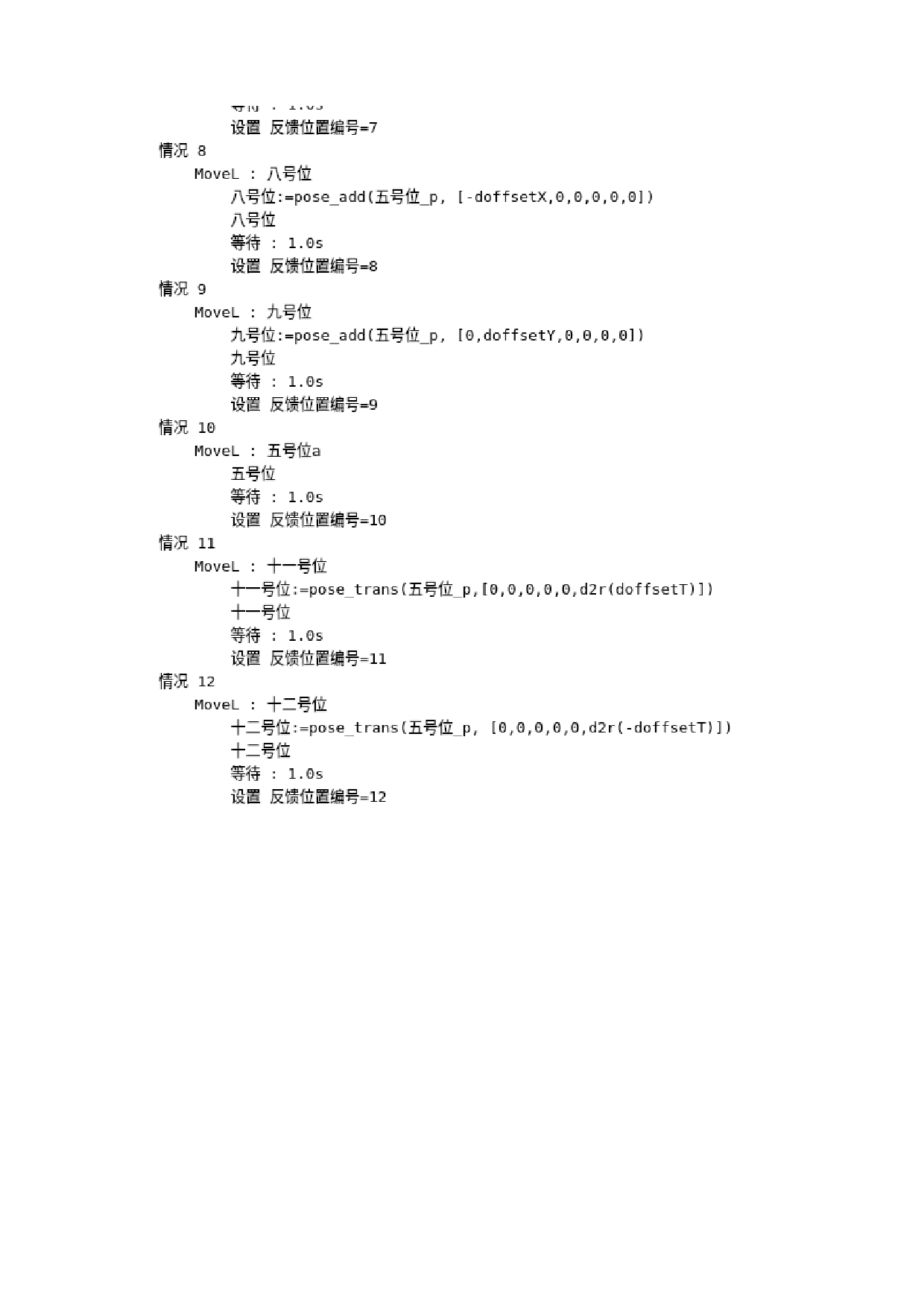
標定按照下圖順序進行,即機器人依次到達 12 個點位,并把這 12 個點位坐標給到相機不同廠家的相機 9 點標定的順序可能不同,可按情況進行調整

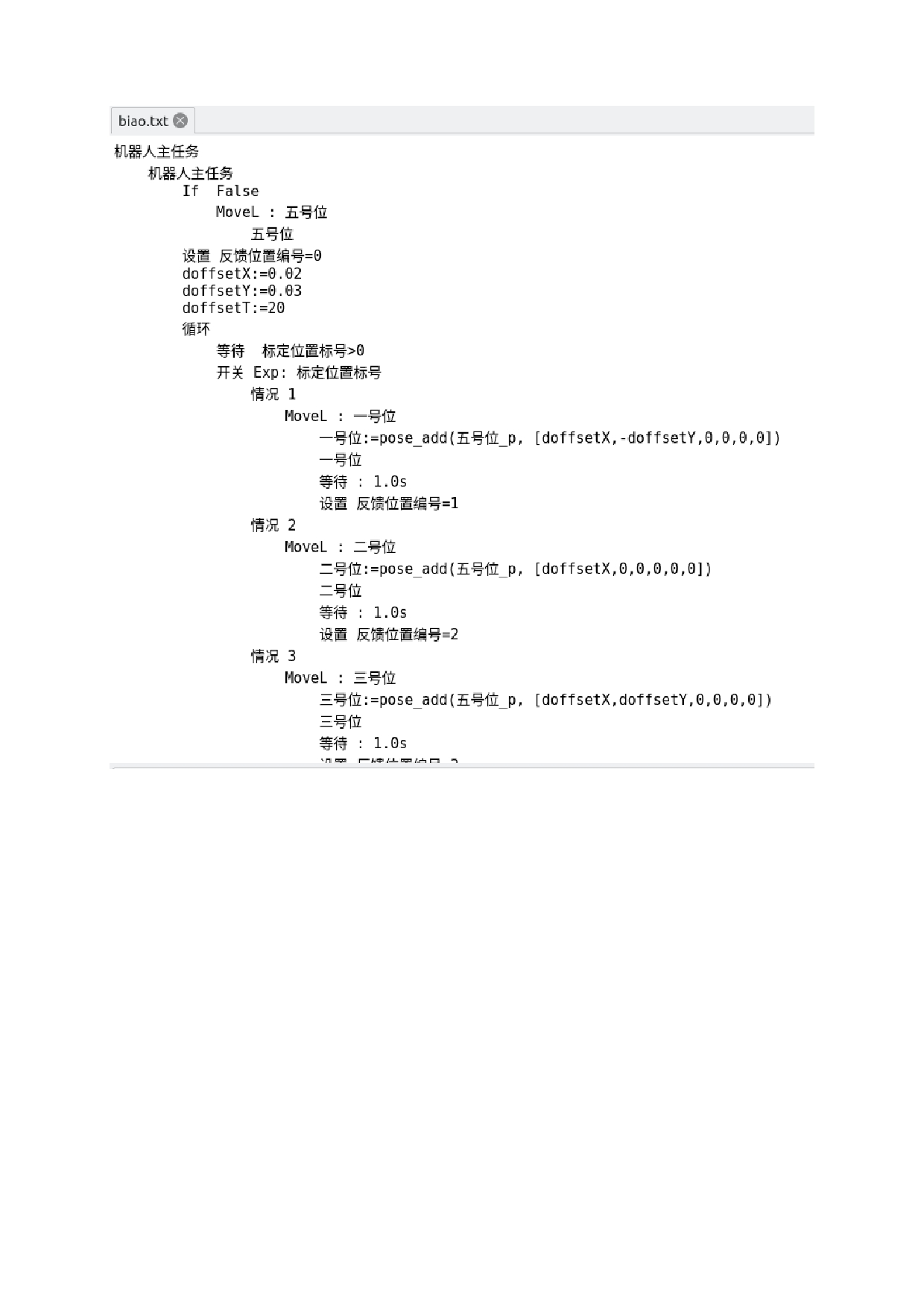
3.1 標定程序
定義和 PLC 通信的兩個整形寄存器:
輸入:標定位置編號
輸出:反饋位置編號
PLC 通過標定位置編號賦值,讓機器人執行對應標定位置,機器人到達位置后,并反饋位置標
號,反饋正確,讓相機記錄相關信息,此時可以執行標定。
注意:可以自定義 X 方向偏移距離(doffsetX),Y 方向偏移距離(doffsetY)和旋轉角度
(doffsetT),doffsetX 和 doffsetY 單位是米, CamNum 是相機標定位置編號,可以利用 PLC 往里面傳遞參數,可以實現根據相機的需要自動標定,
4.機器人程序
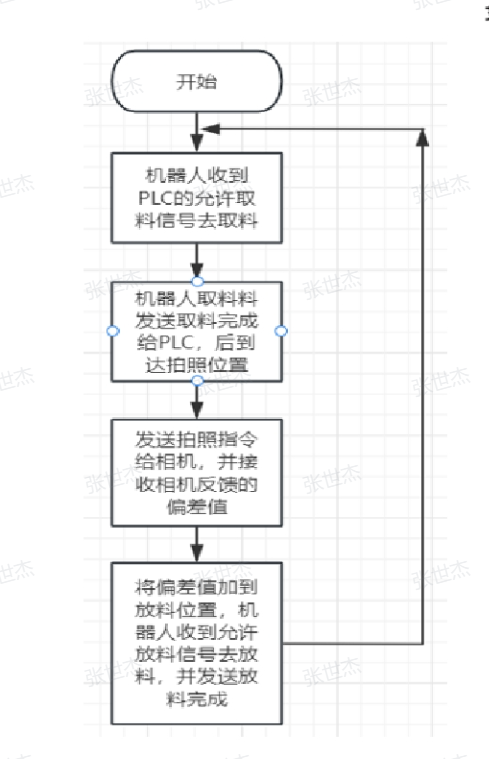
4.1 機器人動作流程
機器人搭配視覺的動作流程如下圖 :

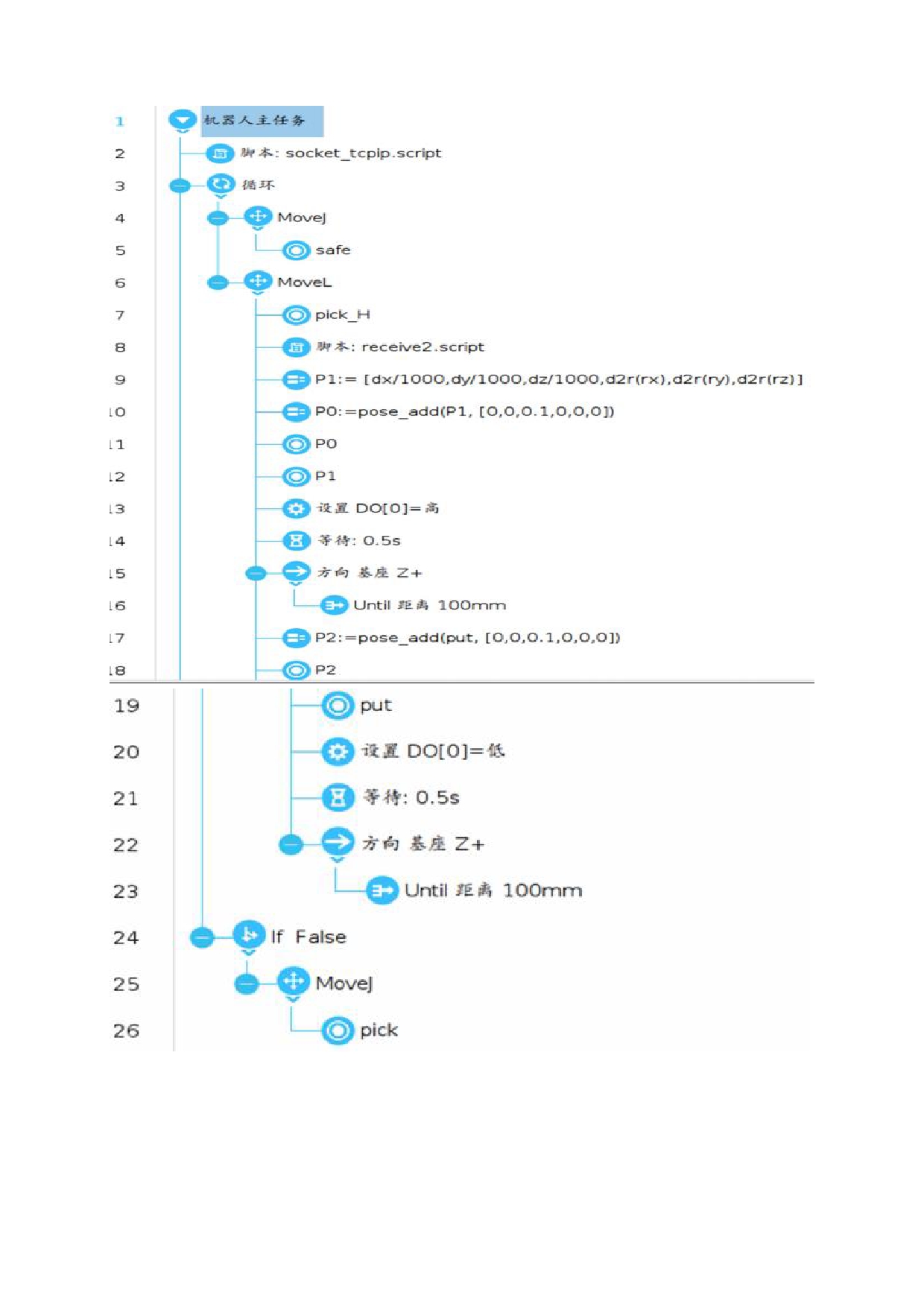
4.2 機器人收相對坐標
機器人收到視覺發送過來的坐標是相對值,也就是相對取料基準位的偏移,機器人在取料
基準位上加上視覺發過來的偏移量(dx,dy,rz),到達糾偏后的取料位。程序如下圖 。
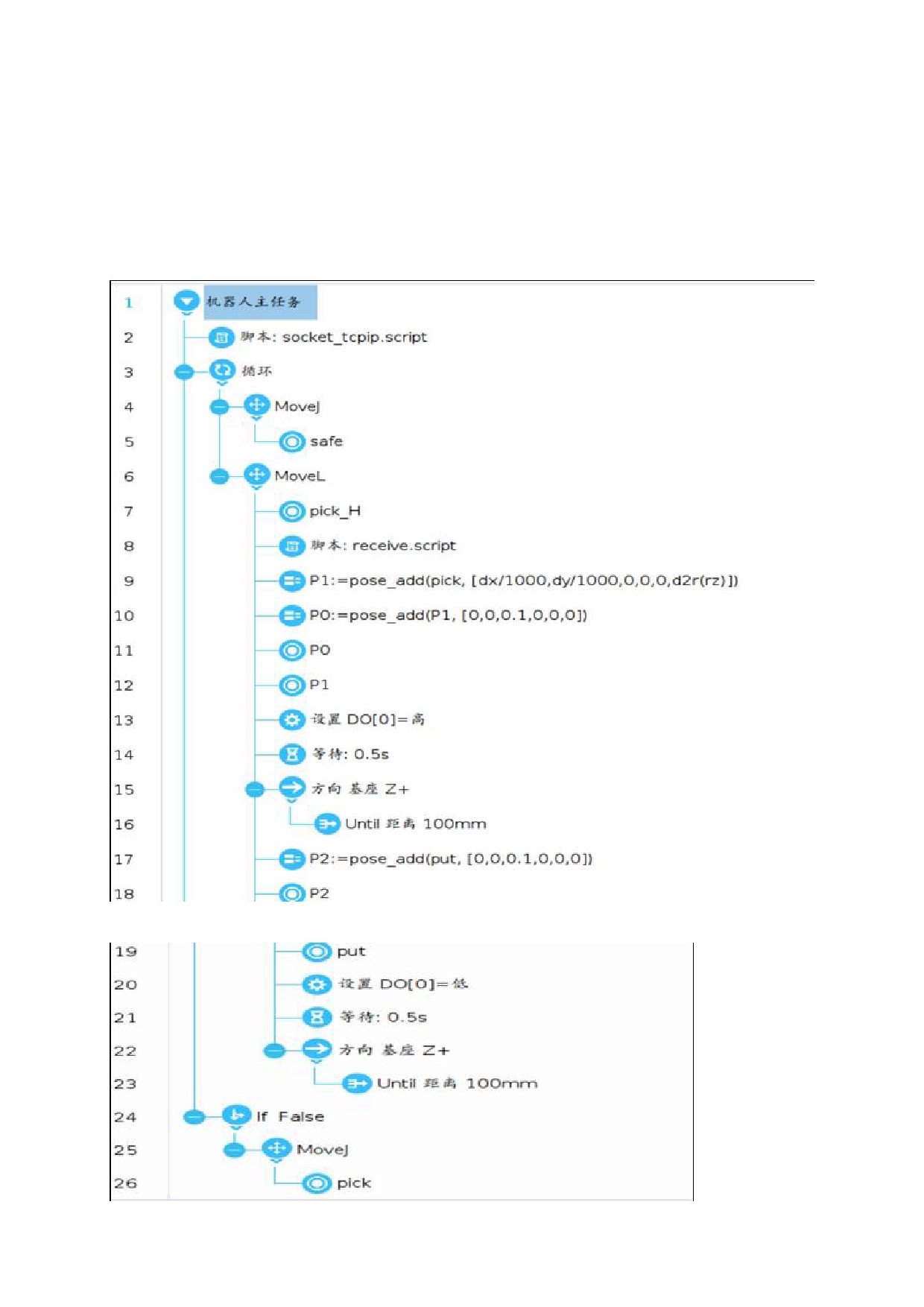
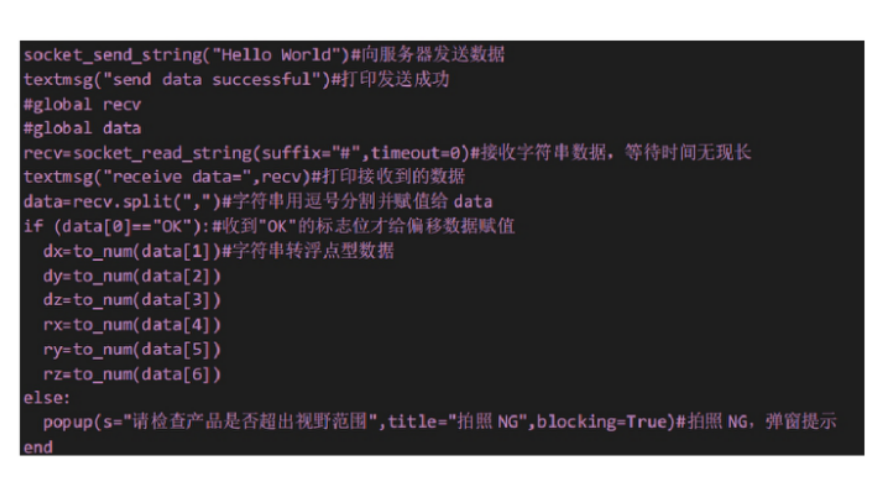
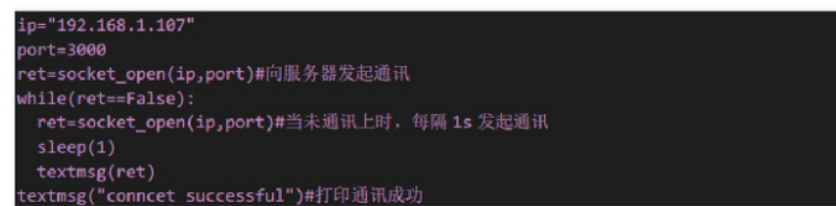
網口通訊程序 socket_tcpip.script 如下圖 :
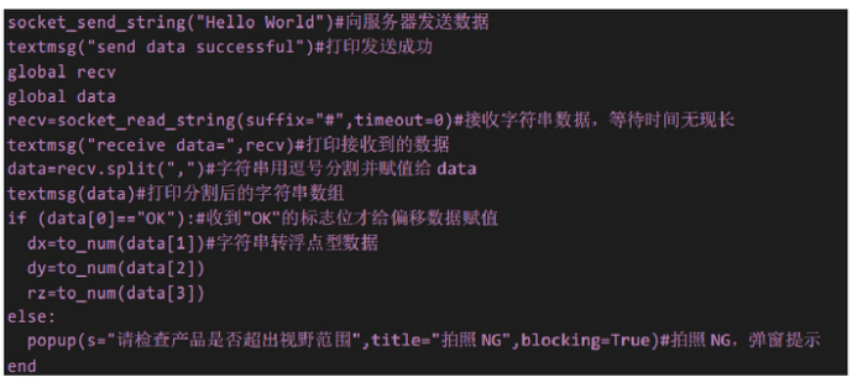
接收視覺坐標腳本程序 receive.script 如下圖 6。視覺發過來的數據按照:"OK,1,2,3#"格式,第 1 位數代表標志符,拍照成功發送"OK",拍照失敗發送"NG";第 2,3,4 位數分別是 X,Y,RZ 方向的偏移,數據用","隔開,末尾用"#"作為結束符。
4.3 機器人收絕對坐標
機器人收到視覺發送過來的坐標是相對值,也就是相對取料基準位的偏移,機器人在取料基準位上加上視覺發過來的偏移量(dx,dy,rz),到達糾偏后的取料位。程序如下圖 。
機器人接收數據腳本如下圖