
















CS機器人Ethernet/IP通訊
1. 簡介
本文介紹CS系列機器人與歐姆龍使用EtherNet/IP通訊,機器人做從站的配置說明。
EtherNet/IP 通信中,掃描器和適配器是十分重要的概念。當開始 EtherNet/IP 通信時,一臺設備相對于另一臺設備,需要打開被稱為 “ 連接 ” 的通信線路。打開連接的一側稱為 “ 掃描器 ”,類似主站;被打開的一側稱為 “ 適配器 ”,類似從站。
2. 操作流程
2.1準備工作
lCS機器人EDS文件、數據結構表格
l歐姆龍NX1P2系列PLC
l安裝歐姆龍SysmacStudio軟件
lCS系列機器人
2.2機器人的設置
l點擊機器人右上角【 logo 】-【設置】-【網絡】設置FB1的網絡IP,需要與PLC同網段。

l在使用ethernet/IP協議時需要注意,連接配置FB1。
l點擊【配置】-【通訊】-【Ethernet/IP】啟動。
根據需要Ethernet/IP通訊連接不上選擇程序動作是暫時/停止。

2.3機器人數據說明
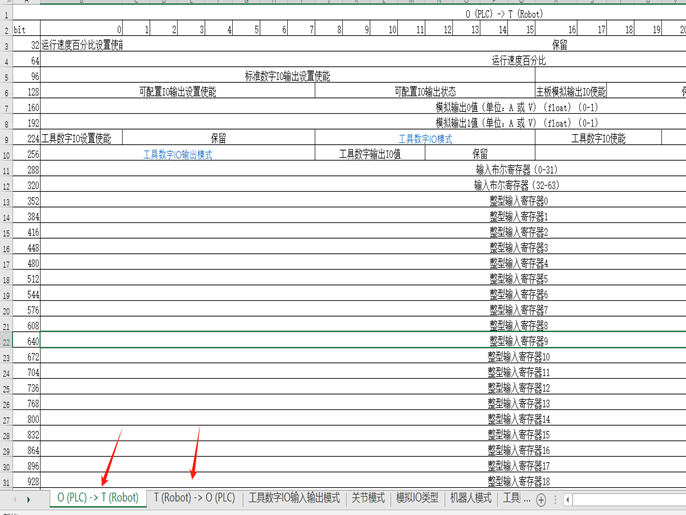
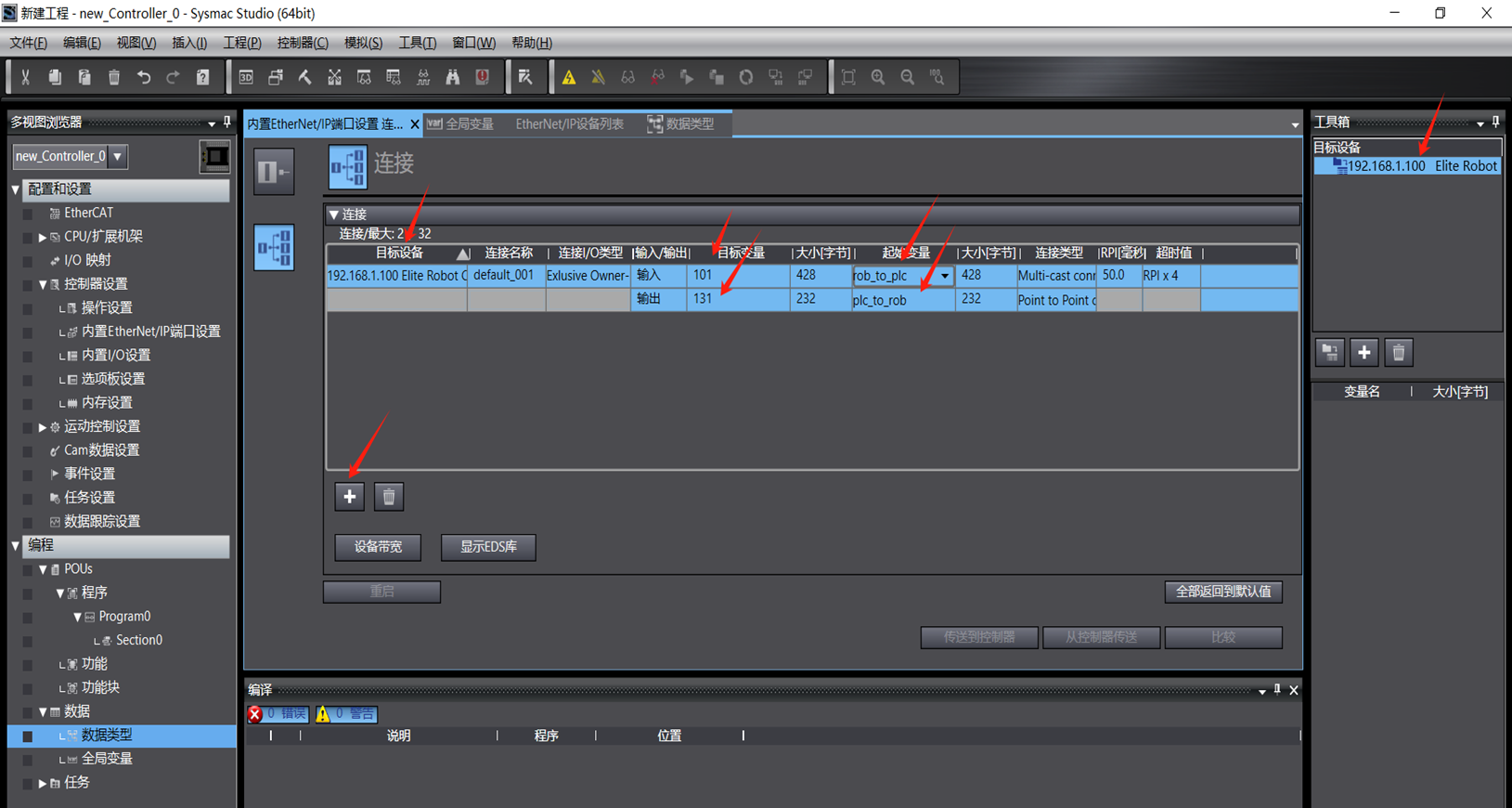
lPLC輸出機器人的變量總數1856位,換算成字節232個
l機器人輸出給PLC的變量總數3424位,換算成字節428個
【運行速度百分比設置使能】是從第一個字節開始計算,所以byte和Bit是沒有偏移。
基本類型可以自己選擇,像0-31這個四個字節有用的只有運行速度設置使能,也可以直接改成數組類型的四個byte【ARRAY[0..3]OF byte】,使用時就只需要給第一個字節的第一位設置值也可以。根據使用習慣來配置類型,像下圖中把使能設置配置成bool占1位,保留配置0-30個bool,31位是從第一個字節的第一位開始偏移,所以bit偏移是要填寫1
【運行速度百分比】第五個字節開始就是運行速度百分比,所以byte偏移4個,bit無需填寫
設置成real浮點數類型設置0.1對應機器人百分之十的速率
【標準數字IO輸出設置使能】從第9個字節開始,偏移8個字節。占用2個字節
【標準IO輸出狀態】從第11字節開始,偏移10字節。后續的都是如此類推。
表格中一行就是32位,就是4個字節

2.4PLC的配置
l打開安裝好的Sysmac Studio軟件,創建新項目,根據硬件設備型號版本信息來填寫。

l打開端口設置PLC的IP地址與機器人同網段
新設備默認是192.168.250.1
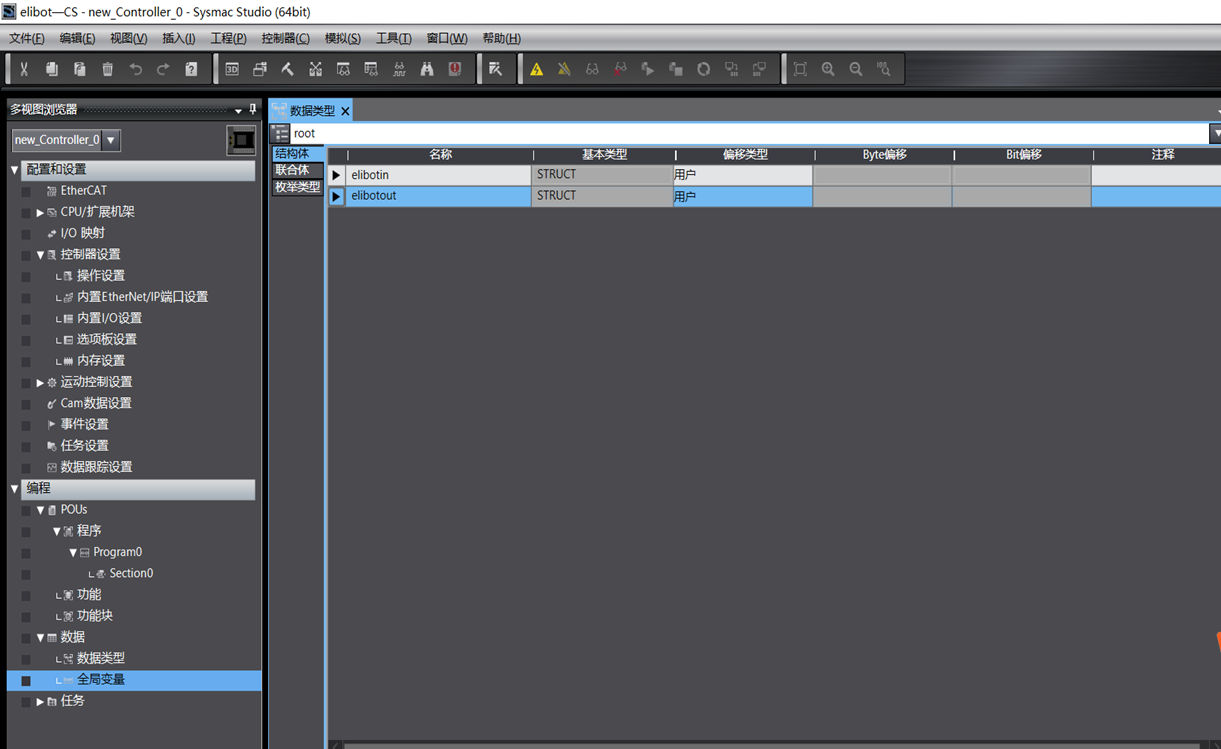
l根據ethernet/IP數據.點擊【編程】-【數據】-【結構數據】-【結構體】
在空白右鍵點擊【新建數據結構類型】 并對結構體進行命名,點擊【偏移類型】下方復選框選擇【用戶】
l點擊新建的結構體右
【新建成員】
在結構體下建立子成員變量
變量的字節數類型、 偏移位數請參考
CS_用戶手冊_EthernetIP 數據格式.xlsx表格或程序范例
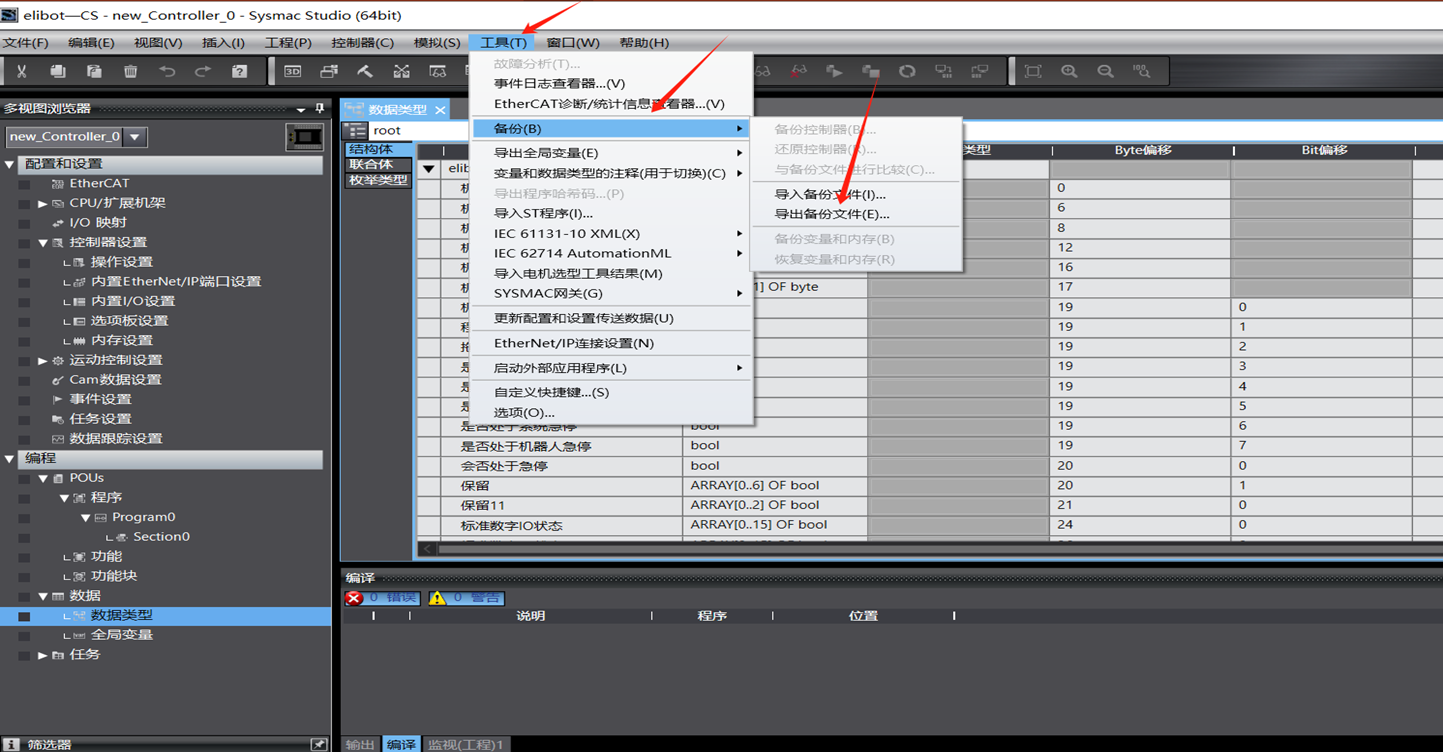
l配置過一次所以數據類型后可以把數據保存出來一直復用
有兩種方式都可以把結構體導出來
1.【點擊菜單欄工具-備份-導出備份文件-導出Nxbackup.dat文件】
復用試直接導入即可,注意導入這個備份文件會包含導出時PLC的型號IP地址需要根據實質情況更改
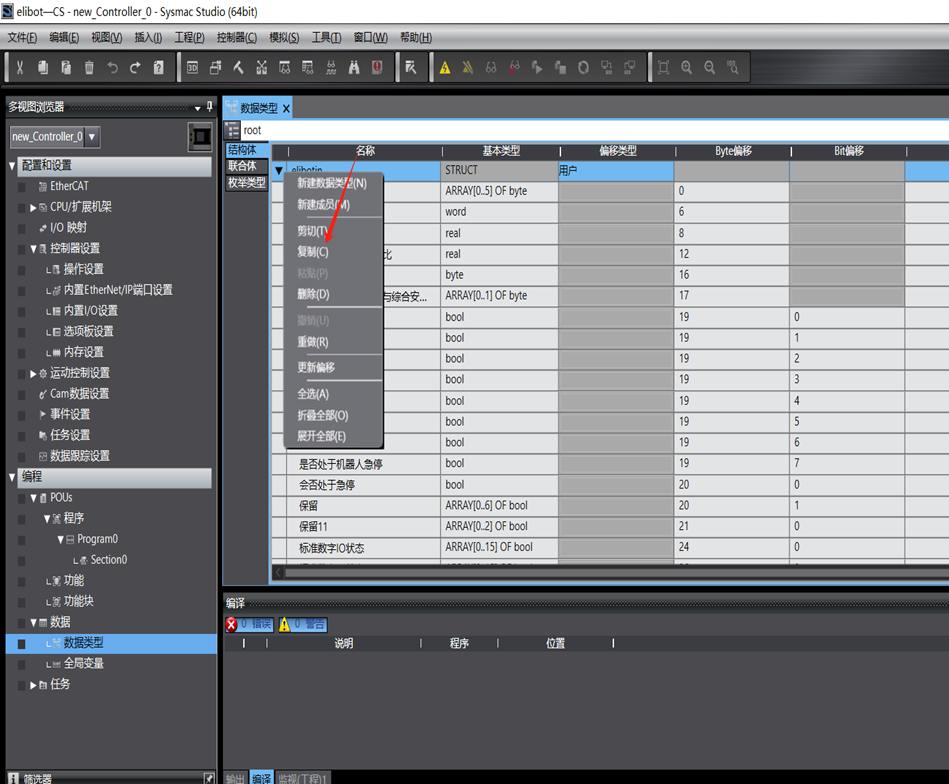
2.可以在數據類型處直接復制數據結構體,粘貼到一個記事本里面去,需要用時ctrl+a全選復制,在Sysmac Studio-數據類型界面粘貼回去即可,注意復制出來的內容不可以刪減,需要刪減,粘貼進Sysmac Studio后在刪減,否則會出現粘貼不進去的情況。
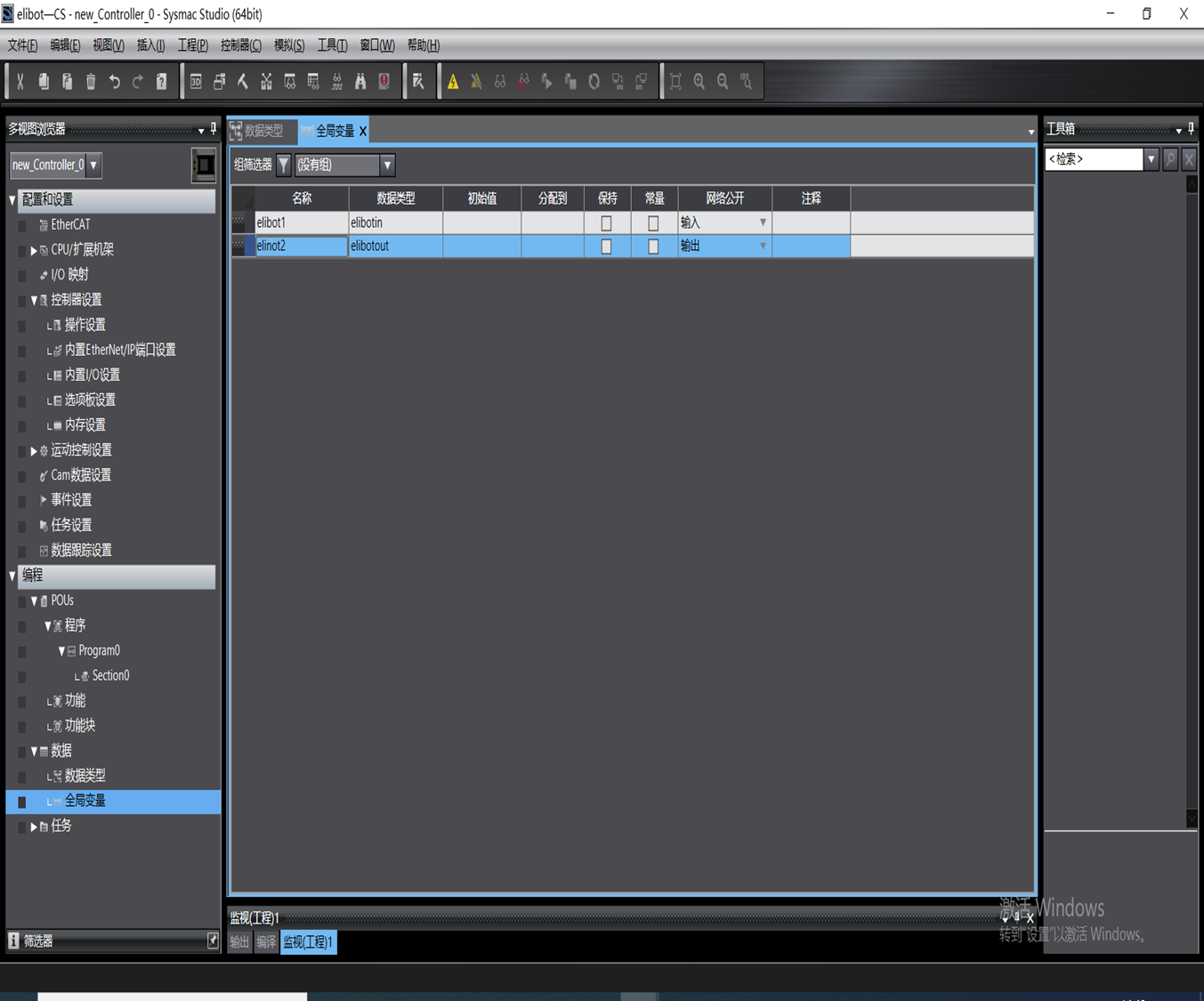
點擊全局變量,在空白右鍵點擊新建,并全局變量進行命名,數據類型選項分別
輸入上一步建立的兩個結構體名稱,網絡公開分別設置為輸入和輸出
這兩個局變量對應 機器人的輸入輸出
將配置好的數據結構體關聯至創建的全局變量中
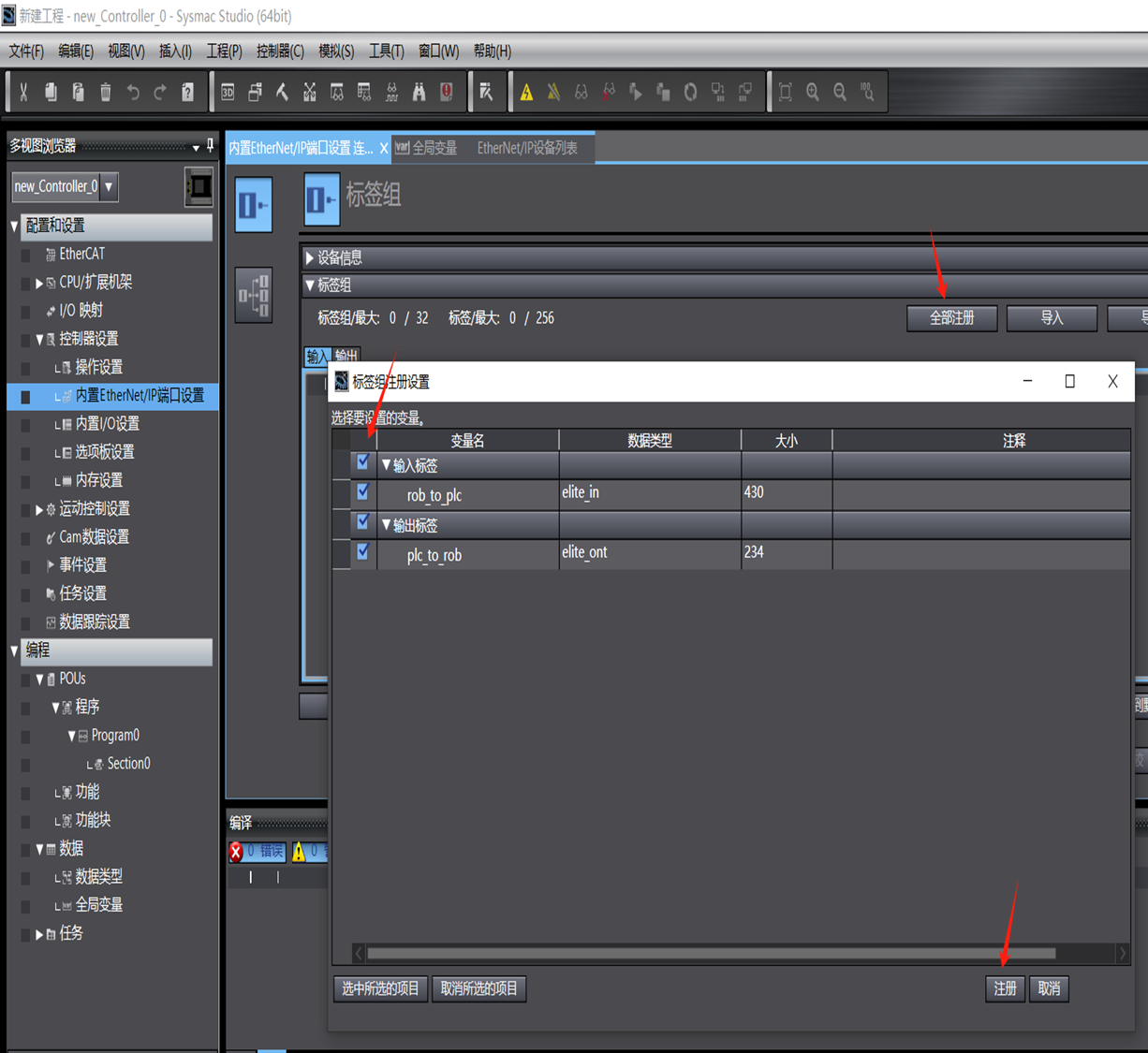
點擊菜單欄【工具】-【Ethernet/IP 連接設置】,打開 Ethernet 設備列表雙擊 PLC 設備打開
點擊選擇【標簽組】,點擊【全部注冊】,將新建的變量全部注冊
下載配置至plc
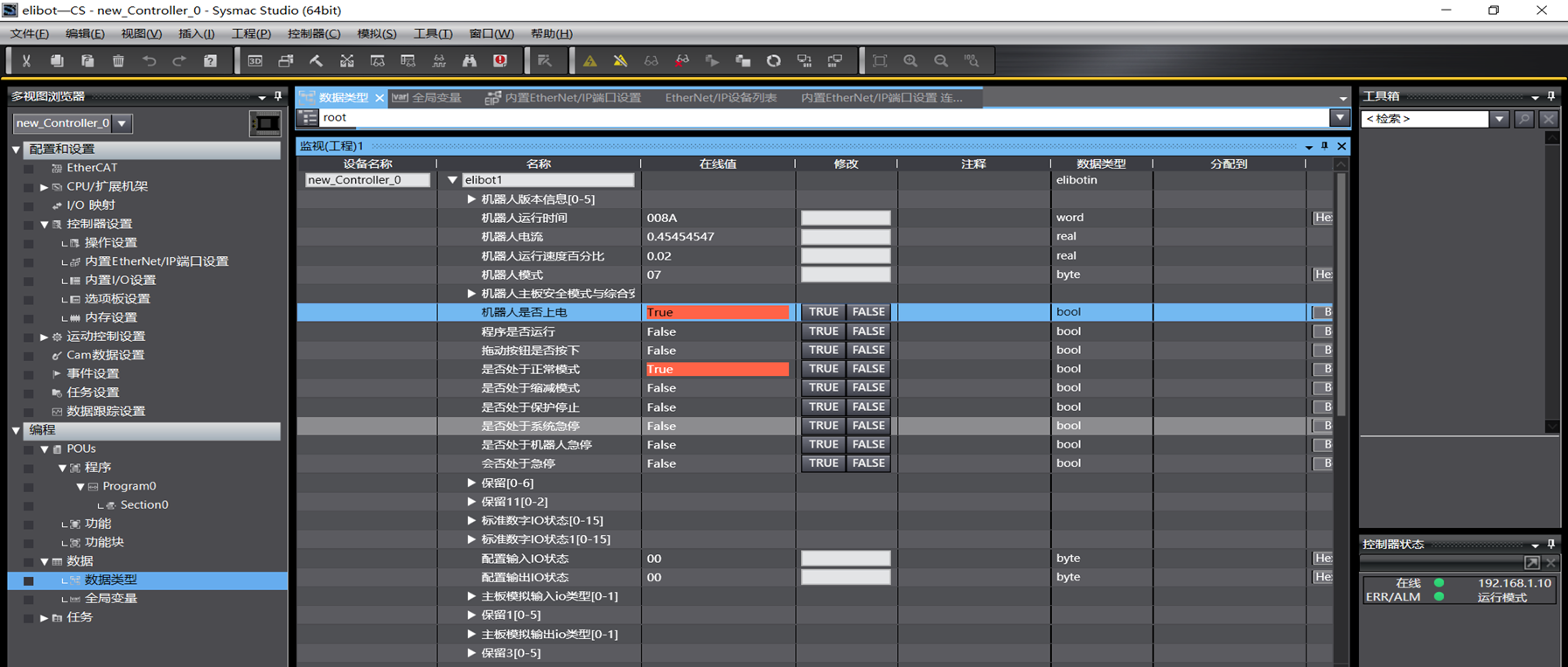
2.5監視輸入輸出狀態
點擊【圖視】-【監視窗口】開啟監控窗口,【名稱】選項輸入建立的全局變量,可在線監控子 變量的狀態
3. 常見問題解答
3.1無法連接到直連PLC?
缺少三個歐姆龍的服務,如果沒有只能重新安裝軟件。
3.2無法輸出數字信號,調整運行速率。
對于的數字信號輸出都要設置信號使能,運行速率也要設置使能
3.3讀取狀態對應不上
檢查變量起始地址是否與數據表格分配地址一致
3.4在機器人示教器上無法關閉數字輸出信號
ethernet/IP通訊中一直把使能至true
3.5讀取不到機器人的運行速率
ethernet/IP通訊中一直把運行速度使能至true


























